一种目标主体与微动部件回波信号分离方法与流程-j9九游会真人
1.本发明属于雷达信号处理领域,具体涉及一种基于汉克尔矩阵低秩稀疏分解的目标主体与微动部件回波信号分离方法,用于窄带雷达探测条件下的目标主体与微动部件回波信号分离。
背景技术:
2.当目标或目标的某些结构发生除整体平动外的振动或旋转等微动时,这类运动会对雷达回波信号产生频率调制,并在目标多普勒频率的附近产生时变的边带。这种现象被称为微多普勒(micro-doppler,m-d)效应。由于m-d效应是雷达目标的一种独特特征,因此它为雷达目标特征提取与分类识别提供了有效信息。一般来说,当雷达目标为非刚体时,目标回波是由一个目标刚性物体(主体)和微动部件的信号叠加组成的多分量信号。由于微动部件与目标主体部分的运动特征不同,在逆合成孔径雷达(inverse synthetic aperture radar,isar)成像领域,通常都是认为微动部件的回波影响了成像的质量,因此须从整体回波中滤除;而在自动目标识别(automatic target recognition,atr)领域主体回波又被当作阻碍微多普勒特征提取的信息。
3.因此,如何实现目标微动和主体信号的分离和估计,近年来已得到了研究人员的关注。其中基于点-线对偶性的方法包括霍夫变换、逆约旦变换以及它们的扩展形式已经被成功应用于提取主体和微动部件回波的瞬时频率曲线,但是大多数点-线对偶方法需要预先设置微动信号的瞬时频率调制模型,例如多项式函数和正弦函数,当微动信号的调制模型更加复杂时,上述方法会出现模型失配问题。尽管无需预先设定模型的数据驱动和自适应滤波方法,例如经验模态分解、变分分解以及它们的改进形式已经被应用于获取微动与主体回波的分量信号,然而上述方法需要预先设定模态的数量等信息,且对预先设定的参数值较为敏感。时频分析作为一种有效的非平稳信号处理工具,也经常被用于分析非平稳信号在时频域的特征,例如分数阶傅里叶变换、线性时频变换等,但是根据海森堡测不准原理,微动信号在时频域分辨率常常受到限制从而影响参数提取的精度。随着稀疏信号处理和发展,压缩感知方法已被应用于信号超分辨率、去噪和重构恢复等方面,文献提出一种结合顺序计量和感知的方法分别获取目标主体和微动部件回波在时频域的位置和幅度信息,但是上述方法需要在多个维度采用正交匹配追踪(omp)等贪婪算法进行计算,需要消耗较高的计算资源。基于主体和微动信号回波在成像域、距离-慢时间域的低秩和稀疏特性,在isar成像领域,低秩稀疏矩阵分解(low rank and sparse matrix decomposition,lrsd)方法被成功应用于剔除微动信号并同时实现对主体部件的成像,例如交替方向乘子法(alternating direction method of multipliers,admm)、鲁棒主成分分析(robust principal component analysis,rpca),但大多数方法都是基于宽带雷达回波数据分析的。与宽带雷达不同,基于窄带雷达的微动目标主体和微动部件回波通常位于少数几个距离单元内,因此其回波可近似为一维信号。低秩学习可看作是稀疏学习由一维向量向二维矩阵的推广,虽然通过时频变换可以将窄带雷达主体回波信号转换为二维时频矩阵的形
式,但是在转换后如何保证目标主体信号的低秩性,从而采用lrsd的方法实现窄带雷达目标主体回波和微动部件回波的有效分离还需进一步研究。此外,大多数基于宽带雷达的lrsd方法主要考虑的是如何将微动部件回波信号和噪声剔除从而实现目标主体信号的isar,并未关注提取的微动信号的质量。
技术实现要素:
4.本发明所要解决的技术问题是:
5.为了避免现有技术的不足之处,针对微动和主体信号分离问题,本发明提供一种基于汉克尔矩阵低秩稀疏分解的目标主体与微动部件回波信号分离方法。
6.为了解决上述技术问题,本发明采用的技术方案为:
7.一种目标主体与微动部件回波信号分离方法,其特征在于步骤如下:
8.s1:根据汉克尔矩阵和最大重叠率的短时矩阵的等价性,将微动和主体信号分离问题构建为低秩稀疏矩阵分解模型;
9.s2:在低秩稀疏矩阵分解模型中引入噪声变量,并采用三块交替方向乘子法求解该模型;在每次迭代中主体信号、微动信号和噪声的时频表征分别采用奇异值分解、软阈值函数和最小二乘法求解。
10.本发明进一步的技术方案:s1所述的将微动和主体信号分离问题构建为低秩稀疏矩阵分解模型为:
[0011][0012]
式中,||
·
||
*
为核范数算子,||
·
||1为l1范数算子,λ>0为正则化参数,l为主体信号的时频分布矩阵l,x为微动回波的时频表征,s为回波信号的时频表征。
[0013]
本发明进一步的技术方案:s2具体如下:
[0014]
考虑到实际应用中回波信号s包含噪声,为减小噪声对重构数据的影响,将低秩稀疏矩阵分解模型重新改写为
[0015][0016]
式中δ>0为噪声参数,||
·
||f为frobenius范数算子;为方便求解,将式(14)所描述的问题转换为无约束优化形式
[0017][0018]
式中ρ1>0为惩罚参数;引入噪声变量n,式(15)所描述的问题等价于
[0019][0020]
上述问题为主成分分析问题,它的增广拉格朗日函数被写成
[0021][0022]
式中y为拉格朗日乘子,ρ2>0为惩罚系数,《
·
,
·
》表示两个矩阵的内积;式(17)等价于
[0023][0024]
采用三块交替方向乘子法将(18)中的优化问题分解为以下子问题:
[0025][0026]
为了更新主体信号的时频分布矩阵l,目标函数被改写为
[0027][0028]
该问题为核范数约束问题,通过奇异值收缩算子求解
[0029][0030]
式中其中是软阈值函数soft(σ,γ)=sign(σ)max{0,|σ|-γ};为了更新微动回波的时频表征x,根据(19)其目标函数为
[0031][0032]
式(22)是l1范数最小化问题,它的解通过软阈值函数得到
[0033][0034]
为了估计信号的噪声的时频表征n,根据(19)其目标函数为
[0035][0036]
对式(24)沿着n求偏导数,令其值为零,则(24)的解为
[0037][0038]
一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
[0039]
一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
[0040]
本发明的有益效果在于:
[0041]
本发明提供的一种在窄带雷达采样条件下的基于汉克尔矩阵的低秩稀疏分解方法。首先,根据汉克尔矩阵和最大重叠率的短时矩阵的等价性,将微动和主体信号分离问题构建为低秩稀疏矩阵分解模型;其次,在模型中引入噪声变量,并采用三块交替方向乘子法求解该模型,在每次迭代中主体信号、微动信号和噪声的时频表征分别采用奇异值分解、软阈值函数和最小二乘法求解。所提方法可以有效分离噪声环境下的目标主体与微动部件回波信号。对仿真和实测数据的处理结果验证了所提方法的有效性。
[0042]
与现有技术相比,其优点如下:
[0043]
(1)推导了窄带雷达目标主体信号的汉克尔矩阵形式,从而保证了其时频表征的低秩性;
[0044]
(2)在低秩稀疏矩阵分解模型中添加了噪声变量,提高了方法的鲁棒性。
附图说明
[0045]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0046]
图1短时信号矩阵与汉克尔矩阵转换示意图;
[0047]
图2目标、主体和微动部件回波时频表征的奇异值;
[0048]
图3本发明方法框架;
[0049]
图4所提方法与admm算法分离的主体与微动部件回波信号;(a)理想信号的时频表征;(b)加入高斯噪声信号的时频表征;(c)admm分离的主体回波信号;(d)admm分离的微动部件回波信号;(e)提出方法分离的主体回波信号;(f)提出方法分离的微动部件回波信号;
[0050]
图5所提方法对实测数据的处理结果:(a)实验场景;(b)自旋目标;(c)自旋目标的时频表征;(d)提出方法分离的主体回波信号;(e)提出方法分离的微动部件回波信号。
具体实施方式
[0051]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此
之间未构成冲突就可以相互组合。
[0052]
本发明提出了一种在窄带雷达采样条件下的基于汉克尔矩阵低秩稀疏分解的主体和微动回波信号分离方法,当相干积累时间(coherence integration time,cit)较短时,慢速运动的主体部件可以被认为是匀速运动,因此,主体信号的汉克尔矩阵可以被认为是低秩先验;此外,由于微动部件散射点的稀疏性先验,微动信号在时频谱占据的单元是有限的,微动信号的时频表征矩阵可以被当作稀疏矩阵;根据汉克尔矩阵和最大重叠的短时矩阵的等价性,回波信号的时频表征矩阵可以被分解为低秩矩阵和稀疏矩阵。模型还引入了噪声变量以估计和消除噪声的影响。因此,微动和主体信号分离被建模为具有三个约束条件的凸优化问题,通过三块变量交替乘子法(three block alternating direction method of multipliers,3b-admm)来求解上述问题。
[0053]
具体包括如下步骤:
[0054]
步骤一:在高频电磁辐射条件下,目标可以用点散射模型来构建。假设微动目标由k个散射点组成,则经过混频和相干处理后的微动目标雷达回波信号一般可表示为
[0055][0056]
其中,ak(t)表示第k个散射点的反射率,λc代表雷达发射信号的载频,fk(t)代表瞬时频率,相对于瞬时相位ak(t)和fk(t)是变化缓慢的函数,满足|a
′k(t)|,|fk(t)|<<|fk(t)|,rk(t)为雷达到第k个散射点的瞬时距离,为第k个回波信号分量的初始相位,η(t)代表加性噪声。当考虑雷达为窄带雷达时,即目标在cit内仅在单个距离分辨单元运动,同时具有平动和微动的散射点的瞬时频率可以表示为
[0057][0058]
其中,fb(t)和分别表示目标整体平动和微动引起的雷达回波多普勒频率和微多普勒频率调制,其中由整体平动引起的多普勒频率可以被建模为一个多项式函数fb(t)=c0 c1t c2t2
…
c
p
t
ꢀꢀ
p
(3)
[0059]
其中,c0,...,c
p
为多项式系数,p是多项式阶数,在cit内,可近似认为目标的整体平动只有匀速运动,即频率在cit内可以被视为是固定的fb(t)≈c0。微多普勒频率(例如振动和自旋引起的微多普频率)通常被近似为正弦函数
[0060][0061]
其中,ak,ωk和k分别为正弦函数的振幅、角频率和初始相位。微动目标的回波一般由主体部件和微动部件组成
[0062]
s(t)=l(t) x(t)
ꢀꢀ
(5)
[0063]
其中,l(t)和x(t)分别代表主体部件和微动部件的回波,而主体部件的回波的瞬时频率频率cit内为c0。式(5)描述的微动目标回波信号是一个典型的非平稳信号,stft作为一种线性且无交叉项的时频分析方法常被用来处理非平稳信号,stft的表达式为
[0064]
stft(t,f)=∫s(τ)h
σ
(τ-t)exp(-j2πfτ)dτ
ꢀꢀ
(6)
[0065]
其中,stft(t,f)为短时傅里叶变换后的时频分布,h
σ
代表窗长为σ的窗函数,窗函数可以表示为高斯窗和矩形窗等。如图1所示,最大重叠的短时信号矩阵可以被认为是汉克尔矩阵,其中,ms是滑动窗的间隔,当ms=1时滑动窗间隔最小,则此时的短时信号是最大重叠的。为了方便分析,将式(6)可以改写为矩阵的形式
[0066]
sm×
l
=fm×
lhl
×
lsl
×nꢀꢀ
(7)
[0067]
其中,s为回波信号的汉克尔矩阵形式,s=l x,l和x分别表示主体部件和微动部件的回波,s为回波信号的时频表征,s=l x,l和x分别表示主体部件和微动部件的回波的时频表征,h表示对角窗矩阵,h=diag{h
σ
(1),...h
σ
(n),...h
σ
(n)},diag{
·
}代表对角化操作,f为部分傅里叶变换矩阵包含了傅里叶变换矩阵的前l列,s的汉克尔矩阵形式为
[0068][0069]
其中,m为接收信号的长度,m=l n-1,在降噪等应用中,汉克尔矩阵的行列数应该相等或者接近,其中
[0070][0071]
目标主体部件上的散射点数量通常远小于雷达回波矩阵的行或列的数量,因此,主体部件的雷达回波的汉克尔矩阵形式d具有低秩特性,主体部件回波的时频表征为
[0072]
l=fhl
ꢀꢀ
(10)
[0073]
其中部分傅里叶矩阵f是全列秩即l<m,窗函数矩阵是对角矩阵h,根据矩阵乘积的性质
[0074][0075]
因此主体部件的雷达回波的时频分布也是低秩的。图2为目标、主体和微动部件回波时频表征的归一化奇异值,从图2中可以看出,相对于目标和微动部件回波的时频表征,主体回波信号的时频表征的奇异值大部分为0,因此它的秩最小。由此验证了主体回波汉克尔矩阵的低秩特性。
[0076]
步骤二:基于lrsd框架,主体和微动信号的分离问题可以被构建为
[0077][0078]
式中λ>0为正则化参数,||
·
||0为l0范数算子,(12)所定义的问题一般可以被称为lrsd问题,由于l0范数是不连续的,很难求解模型以获得最优解,一个有效的策略是将l0范数松弛为具有凸性质的l1范数,另外因为核范数也是凸的,一般低秩约束由核范数表示。因此(12)式所描述的问题可以被重新构造为
[0079][0080]
式中||
·
||
*
为核范数算子,||
·
||1为l1范数算子,在一定条件下,式(13)所描述的凸优化模型可以精确重构低秩矩阵l和稀疏矩阵x,考虑到实际应用中回波信号s通常包含噪声,为减小噪声对重构数据的影响,可以将式(13)重新改写为
[0081][0082]
式中δ>0为噪声参数,||
·
||f为frobenius范数算子。为方便求解,可以将式(14)所描述的问题转换为无约束优化形式
[0083][0084]
式中ρ1>0为惩罚参数。引入噪声变量n,式(15)所描述的问题等价于
[0085][0086]
步骤三:上述问题为主成分分析问题,它的增广拉格朗日函数可以被写成
[0087][0088]
式中y拉格朗日乘子,ρ2>0为惩罚系数,《
·
,
·
》表示两个矩阵的内积。式(17)可以等价于
[0089][0090]
采用3b-admm将(18)中的优化问题分解为以下子问题,每个子问题都更容易处理:
[0091][0092]
为了更新主体信号的时频分布矩阵l,目标函数可以被改写为
[0093][0094]
该问题为核范数约束问题,可以通过奇异值收缩算子求解
[0095][0096]
式中其中是软阈值函数soft(σ,γ)=sign(σ)max{0,|σ|-γ}。为了更新微动回波的时频表征x,根据(19)其目标函数为
[0097][0098]
式(22)是l1范数最小化问题,它的解可以通过软阈值函数得到
[0099][0100]
为了估计信号的噪声的时频表征n,根据(19)其目标函数为
[0101][0102]
对式(24)沿着n求偏导数,令其值为零,则(24)的解为
[0103][0104]
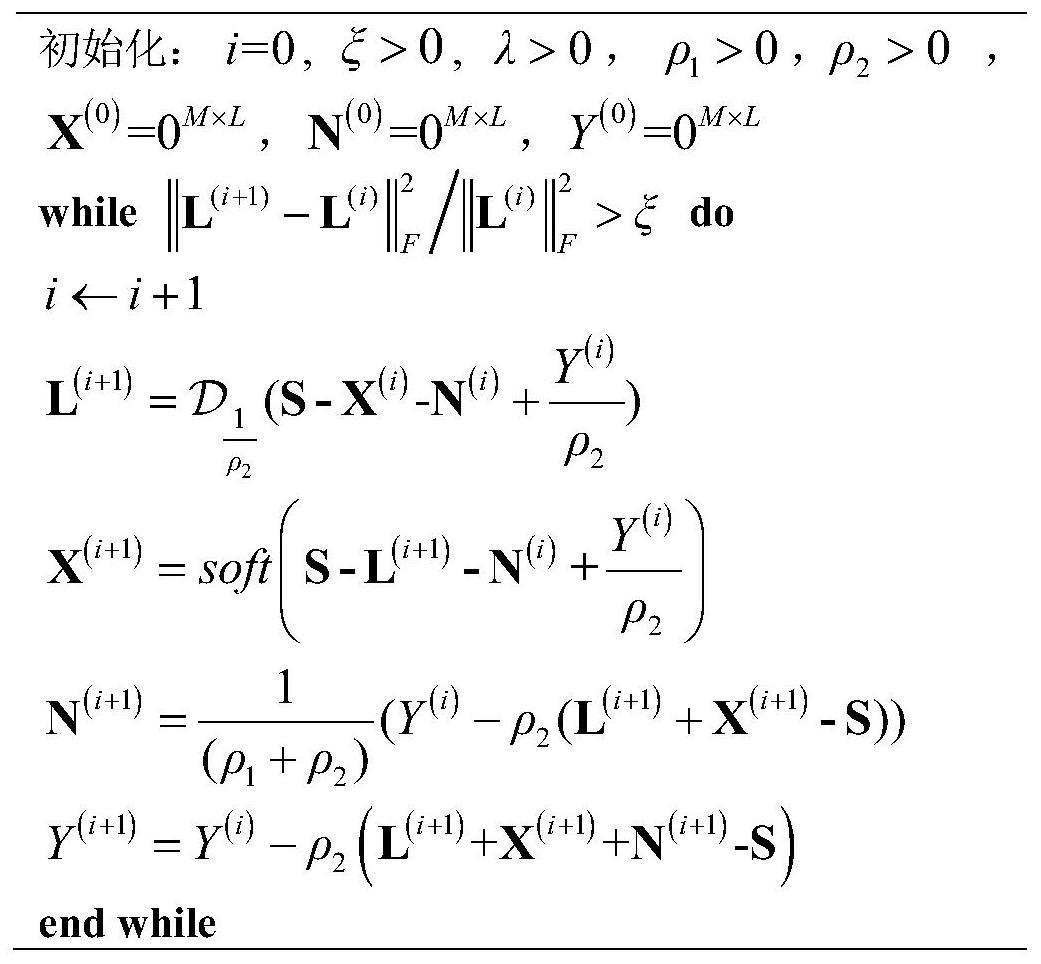
图3给出了方法的框架,中拉格朗日乘数、噪声和微动信号的时频表征通过零矩阵初始化。在参数设置方面,相对误差ξ应设置为小于0.01的值,ρ1取值范围为0.01-0.1,所提方法可以获得较好的效果。将ρ2设置为回波信号时频表征的frobenius范数的倒数,即ρ2=υ/||s||f,其中υ范围设置为1-4,正则化参数λ应设置为0.001-0.01。图4为所提方法与admm算法分离的主体与微动部件回波信号。从图中可知,相比于admm算法,所提方法可以有效分离主体与微动部件回波信号,并克服噪声带来的影响。为了进一步验证所提方法,在微波暗室设计开展了原理性实验。如图5所示,所提方法可以有效分离自旋目标的主体与微动部件回波信号。
[0105]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
当前第1页1
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!