用于移动设备定位的可重构智能表面(ris)辅助式定时误差校准的制作方法-j9九游会真人
用于移动设备定位的可重构智能表面(ris)辅助式定时误差校准
1.背景
1.发明领域
2.本发明一般涉及无线通信领域,且更具体地涉及利用射频(rf)信号来确定移动设备的位置或定位。
3.2.相关技术描述
4.在无线通信网络中,可通过使用移动设备对由该无线通信网络的传送方设备传送的rf信号进行测量来确定该移动设备的定位。新技术正被开发以在这种类型的定位确定中利用可重构智能表面(ris),其中移动设备对由一个或多个传送方设备传送并从一个或多个ris反射的rf信号进行测量。然而,以这种方式使用ris已受到限制。虽然可使用基站和其他无线节点来取得参考测量以确定和/或补偿网络或移动设备处的某些定时误差,但是ris传统上尚未被用于这种类型的误差校准。
5.简要概述
6.根据本公开的一种针对在移动设备的定位确定中使用的无线节点中的定时误差的可重构智能表面(ris)辅助式校准的示例方法包括获得无线参考信号测量集合,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量,对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量,对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量。该方法还包括获得包括第三测量与第四测量之间的差的差分值。该方法还包括至少部分地基于以下各项来确定该移动设备的定位估计:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
7.根据本公开的一种用于针对在移动设备的定位确定中使用的无线节点中的定时误差的可重构智能表面(ris)辅助式校准的示例设备,包括收发机、存储器、以及与该收发机和该存储器通信地耦合的一个或多个处理单元。该一个或多个处理单元被配置成经由该收发机获得无线参考信号测量集合,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量;对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量;对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量。该一个或多个处理单元还被配置成获得包括第三测量与第四测量之间的差的差分值。该一个或多个处理单元还被配置成至少部分地基于以下各项来确定该移动设备的定位估计:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
8.根据本公开的另一种用于针对在移动设备的定位确定中使用的无线节点中的定
时误差的可重构智能表面(ris)辅助式校准的示例设备包括用于获得无线参考信号测量集合的装置,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量,对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量,对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量。该设备还包括用于获得包括第三测量与第四测量之间的差的差分值的装置。该设备还包括用于至少部分地基于以下各项来确定该移动设备的定位估计的装置:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
9.根据本公开的一种示例非瞬态计算机可读介质包括存储用于针对在移动设备的定位确定中使用的无线节点中的定时误差的可重构智能表面(ris)辅助式校准的指令。这些指令包括用于获得无线参考信号测量集合的代码,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量,对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量,对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量。这些指令还包括用于获得包括第三测量与第四测量之间的差的差分值的代码。这些指令还包括用于至少部分地基于以下各项来确定该移动设备的定位估计的代码:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
10.附图简述
11.图1是根据实施例的定位系统的示图。
12.图2是第五代(5g)新无线电(nr)定位系统的示图,其解说实现在5g nr通信系统内的定位系统(例如,图1的定位系统)的实施例。
13.图3是根据一些实施例的定位系统的配置的简化图,其解说可如何执行对用户装备(ue)的基于抵达时间差(tdoa)的定位。
14.图4是根据一些实施例的定位系统的配置的简化图,其解说可如何执行对ue的基于往返时间(rtt)的定位。
15.图5是定位系统的配置的简化图,其解说可如何使用传送接收点(trp)取得参考测量来执行基于双差分rtt的定位。
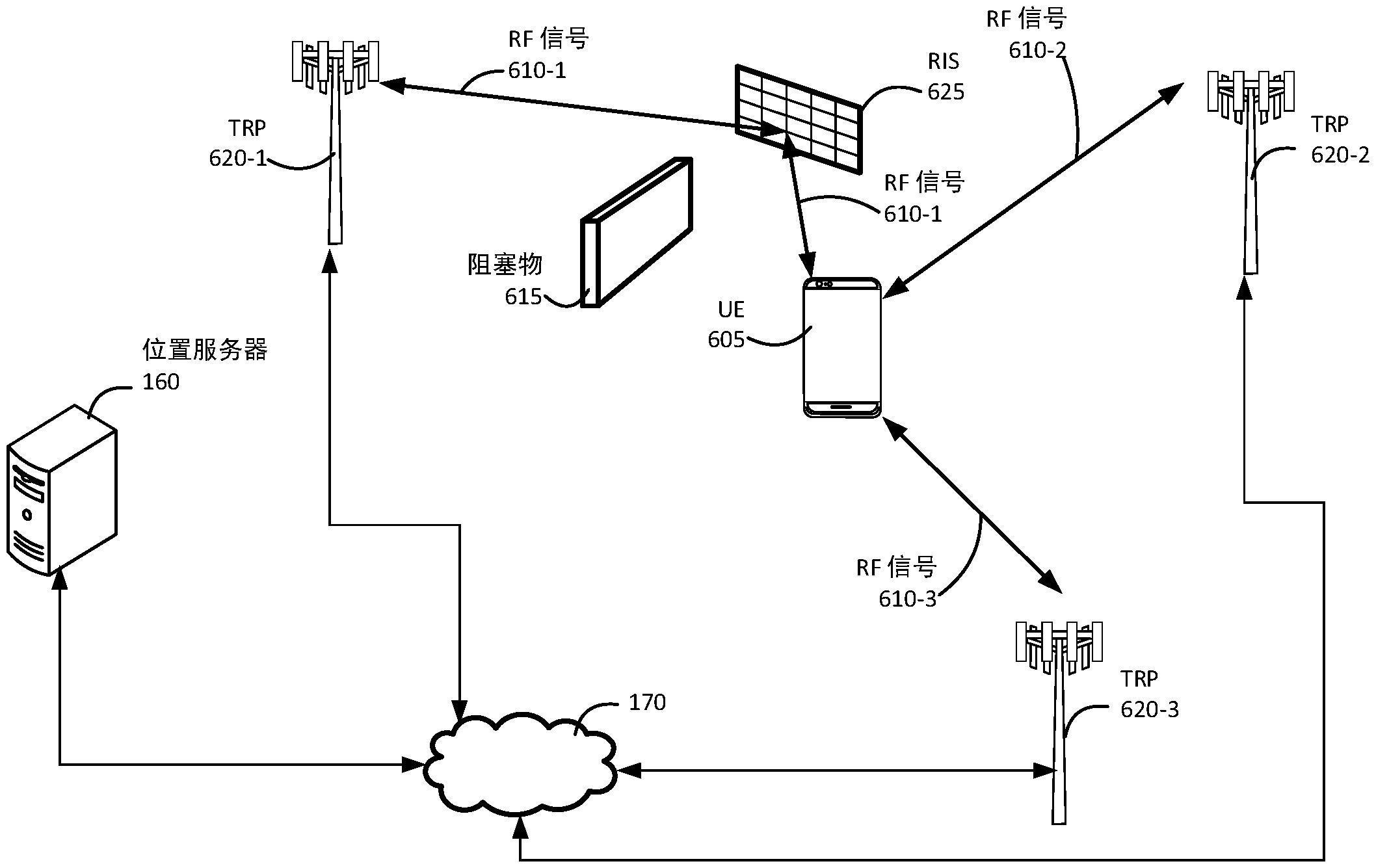
16.图6是根据实施例的定位系统的配置的简化图,其解说通常可如何在定位系统中使用可重构智能表面(ris)。
17.图7-9是根据实施例的配置的简化图,其解说可如何利用ris和ue来取得用于定时误差校准的测量。
18.图10是根据实施例的针对在移动设备的定位确定中使用的无线节点中的定时误差的ris辅助式校准的方法的流程图。
19.图11是可在如本文中所描述的实施例中利用的移动设备的实施例的框图。
20.图12是可在如本文中所描述的实施例中利用的计算机系统的实施例的框图。
21.各个附图中类似的附图标记根据某些示例实现指示类似元素。另外,可以通过在
元素的第一数字后面加上字母或连字符及第二数字来指示该元素的多个实例。例如,元素110的多个实例可被指示为110-1、110-2、110-3等或指示为110a、110b、110c等。当仅使用第一数字来指代此类元素时,将被理解为该元素的任何实例(例如,先前示例中的元素110将指元素110-1、110-2和110-3或元素110a、110b和110c)。
22.详细描述
23.以下描述针对某些实现以旨在描述本公开的创新性方面。然而,本领域普通技术人员将容易认识到,本文中的教导可按众多不同方式来应用。所描述的实现可以在能够根据任何通信标准来传送和接收射频(rf)信号的任何设备、系统或网络中实现,该通信标准诸如:电气和电子工程师协会(ieee)ieee 802.11标准中的任一者(包括被标识为技术的那些标准)、标准、码分多址(cdma)、频分多址(fdma)、时分多址(tdma)、全球移动通信系统(gsm)、gsm/通用分组无线电服务(gprs)、增强型数据gsm环境(edge)、地面集群无线电(tetra)、宽带cdma(w-cdma)、演进数据优化(ev-do)、1xev-do、ev-do修订版a、ev-do修订版b、高速率分组数据(hrpd)、高速分组接入(hspa)、高速下行链路分组接入(hsdpa)、高速上行链路分组接入(hsupa)、演进高速分组接入(hspa )、长期演进(lte)、高级移动电话系统(amps),或用于在无线、蜂窝、或物联网(iot)网络(诸如,利用3g、4g、5g、6g或其进一步实现的技术的系统)内通信的其他已知信号。
24.如本文中所使用的,“rf信号”包括通过传送方(或传送方设备)与接收方(或接收方设备)之间的空间来传输信息的电磁波。如本文中所使用的,传送方可向接收方传送单个“rf信号”或多个“rf信号”。然而,由于通过多径信道的各rf信号的传播特性,接收方可接收到与每个所传送rf信号相对应的多个“rf信号”。传送方与接收方之间的不同路径上所传送的相同rf信号可被称为“多径”rf信号。“无线参考信号”可包括可被用作用于对移动设备进行定位的参考(例如,定时参考)的特定类型的rf信号。如此,无线参考信号可包括可以增强无线参考信号作为参考的优化/性能的特定序列、编码和/或其他特征。
25.图1是根据实施例的定位系统100的简化解说,其中用户装备(ue)105、位置服务器160和/或定位系统100的其他组件可以使用本文所提供的用于进行可重构智能表面(ris)辅助式定时误差校准的技术。然而,可以注意到,本文中所描述的技术不必被限于定位系统100。本文中所描述的技术可以由定位系统100的一个或多个组件来实现。定位系统100可包括:ue 105;用于全球导航卫星系统(gnss)(诸如全球定位系统(gps))的一个或多个卫星110(也被称为航天器(sv));基站120;接入点(ap)130;位置服务器160;网络170;以及外部客户端180。一般而言,定位系统100可以基于由ue 105接收和/或从ue 105发送的rf信号以及传送和/或接收rf信号的其他组件(例如,gnss卫星110、基站120、ap 130)的已知位置来估计ue 105的位置。参考图2更详细地讨论关于特定位置估计技术的附加细节。
26.应注意,图1仅提供了各种组件的一般化解说,其中任何或全部组件可被恰适地利用,并且每个组件可按需重复。具体地,尽管仅解说了一个ue 105,但是将理解,许多ue(例如,数百、数千、数百万等)可利用定位系统100。类似地,定位系统100可以包括比图1中所解说的更多或更少数目的基站120和/或ap 130。连接定位系统100中的各个组件的所解说连接包括数据和信令连接,其可包括附加(中间)组件、直接或间接的物理和/或无线连接、和/或附加网络。此外,可取决于期望的功能性而重新布置、组合、分离、替换和/或省略各组件。在一些实施例中,例如,外部客户端180可被直接连接到位置服务器160。本领域普通技术人
员将认识到对所解说的组件的许多修改。
27.取决于期望的功能性,网络170可以包括各种各样的无线和/或有线网络中的任何一者。网络170可以例如包括公共和/或私有网络、局域网和/或广域网等的任何组合。此外,网络170可以利用一种或多种有线和/或无线通信技术。在一些实施例中,网络170可以包括例如蜂窝或其他移动网络、无线局域网(wlan)、无线广域网(wwan)、和/或因特网。网络170的示例包括长期演进(lte)无线网络、第五代(5g)无线网络(也被称为新无线电(nr)无线网络或5g nr无线网络)、wi-fi wlan和因特网。lte、5g和nr是由第三代伙伴计划(3gpp)定义或正在定义的无线技术。网络170还可以包括不止一个网络和/或不止一种类型的网络。
28.基站120和接入点(ap)130通信地耦合到网络170。在一些实施例中,基站120可以由蜂窝网络供应商拥有、维护、和/或操作,并且可以采用多种无线技术中的任何一者,如以下在本文中所描述的。取决于网络170的技术,基站120可以包括b节点、演进型b节点(enodeb或enb)、基收发机站(bts)、无线电基站(rbs)、nr b节点(gnb)、下一代enb(ng-enb)等。在网络170是5g网络的情形中,作为gnb或ng-enb的基站120可以是可以连接到5g核心网(5gc)的下一代无线电接入网(ng-ran)的一部分。ap 130可以包括例如wi-fi ap或ap。由此,ue 105可以通过使用第一通信链路133经由基站120接入网络170来与网络连通设备(诸如位置服务器160)发送和接收信息。附加地或替换地,因为ap 130也可以与网络170通信地耦合,所以ue 105可以使用第二通信链路135来与因特网连通设备(包括位置服务器160)进行通信。
29.如本文中所使用的,术语“基站”一般可指可位于基站120处的单个物理传输点或多个共置物理传输点。传送接收点(trp)(也被称为传送/接收点)对应于这一类型的传输点,并且术语“trp”在本文中可以与术语“gnb”、“ng-enb”和“基站”互换地使用。物理传输点可包括基站的天线阵列(例如,如在多输入多输出(mimo)系统中那样和/或在基站采用波束成形的情况下)。术语“基站”可附加地指多个非共置物理传输点,这些物理传输点可以是分布式天线系统(das)(经由传输介质来连接到共用源的、在空间上分离的天线的网络)或远程无线电头端(rrh)(连接到服务基站的远程基站)。替换地,非共置物理传输点可以是从ue 105接收测量报告的服务基站和该ue 105正在测量其参考rf信号的邻居基站。
30.如本文中所使用的,术语“蜂窝小区”一般可指用于与基站120进行通信的逻辑通信实体,并且可与用于区分经由相同或不同运营商来进行操作的相邻蜂窝小区的标识符(例如,物理蜂窝小区标识符(pcid)、虚拟蜂窝小区标识符(vcid))相关联。在一些示例中,载波可支持多个蜂窝小区,并且可以根据可为不同类型的设备提供接入的不同协议类型(例如,机器类型通信(mtc)、窄带物联网(nb-iot)、增强型移动宽带(embb)或其他协议)来配置不同蜂窝小区。在一些情形中,术语“蜂窝小区”可指逻辑实体在其上操作的地理覆盖区域的一部分(例如,扇区)。
31.位置服务器160可以包括服务器和/或其他计算设备,该服务器和/或其他计算设备被配置成确定ue 105的估计位置和/或向ue 105提供数据(例如,“辅助数据”)以促成位置确定。根据一些实施例,位置服务器160可包括归属安全用户面定位(supl)位置平台(h-slp),其可支持由开放移动联盟(oma)定义的supl用户面(up)定位j9九游会真人的解决方案,并且可基于存储在位置服务器160中的关于ue 105的订阅信息来支持ue 105的位置服务。在一些实施例中,位置服务器160可以包括发现slp(d-slp)或紧急slp(e-slp)。位置服务器160还可包括
增强型服务移动位置中心(e-smlc),该e-smlc使用控制面(cp)定位j9九游会真人的解决方案来支持对ue 105的定位,以用于ue 105的lte无线电接入。位置服务器160可进一步包括位置管理功能(lmf),该lmf使用控制面(cp)定位j9九游会真人的解决方案来支持对ue 105的定位以用于ue 105的nr无线电接入。在cp定位j9九游会真人的解决方案中,从网络170的角度来看,用于控制和管理ue 105的定位的信令可以使用现有网络接口和协议并且作为信令在网络170的各元件之间交换以及与ue 105进行交换。在up定位j9九游会真人的解决方案中,从网络170的角度来看,用于控制和管理ue 105的定位的信令可以作为数据(例如,使用网际协议(ip)和/或传输控制协议(tcp)来传输的数据)在位置服务器160与ue 105之间交换。
32.如先前所提到的(并且在下面更详细地讨论的),ue 105的估计位置可以基于对从ue 105发送和/或由ue 105接收的rf信号的测量。特别地,这些测量可以提供关于ue 105与定位系统100中的一个或多个组件(例如,gnss卫星110、ap 130、基站120)的相对距离和/或角度的信息。可以基于距离和/或角度测量连同该一个或多个组件的已知位置来在几何上(例如,使用多角测量和/或多边定位)估计ue 105的估计位置。
33.尽管地面组件(诸如ap 130和基站120)可以是固定的,但是实施例并不限于此。可以使用移动组件。而且,在一些实施例中,可以至少部分地基于对在ue 105与一个或多个其他ue(图1中未示出)(该一个或多个其他ue可以是移动的)之间传达的rf信号的测量来估计ue 105的位置。以此方式在ue之间进行的直接通信可以包括侧链路和/或类似的设备到设备(d2d)通信技术。由3gpp定义的侧链路是基于蜂窝的lte和nr标准下的d2d通信形式。
34.可以在各种应用中使用ue 105的估计位置——例如以辅助ue 105的用户进行测向或导航或者辅助(例如,与外部客户端180相关联的)另一用户定位ue 105。“位置”在本文中也被称为“位置估计”、“估计位置”、“位置”、“定位”、“定位估计”、“定位锁定”、“估计定位”、“位置锁定”或“锁定”。确定位置的过程可被称为“定位”、“定位确定”、“位置确定”等。ue 105的位置可包括ue 105的绝对位置(例如,纬度和经度以及可能的海拔)或ue 105的相对位置(例如,表达为在某一其他已知固定位置或某一其他位置(诸如ue 105在某个已知先前时间的位置)的北方或南方、东方或西方以及可能还有上方或下方的距离的位置)。位置也可被指定为大地位置(如纬度和经度)或城市位置(例如,以街道地址的形式或使用其他与位置相关的名称和标签)。位置可以进一步包括不确定性或误差指示,诸如预期位置存在误差的水平距离和可能的垂直距离或以某一置信度水平(例如,95%置信度)预期ue 105位于其内的区域或体积(例如,圆或椭圆)的指示。
35.外部客户端180可以是可以与ue 105具有某种关联(例如,可以由ue 105的用户访问)的web服务器或远程应用,或者可以是向某一或某些其他用户提供位置服务的服务器、应用或计算机系统,该位置服务可以包括获得和提供ue 105的位置(例如,以实现诸如朋友或亲属寻访、资产跟踪、或者儿童或宠物定位之类的服务)。附加地或替换地,外部客户端180可以获得ue 105的位置并将其提供给紧急服务提供商、政府机关等。
36.如先前所提到的,示例定位系统100可以使用无线通信网络(诸如基于lte或基于5g nr的网络)来实现。5g nr是第三代伙伴项目(3gpp)正在进行标准化的无线rf接口。5g nr有望提供优于前代(lte)技术的增强型功能性(诸如显著更快且响应性更强的移动宽带)、通过物联网(iot)设备的增强型传导性等等。附加地,5g nr实现了用于ue的新定位技术,包括抵达角(aoa)/出发角(aod)定位、基于ue的定位以及多蜂窝小区往返信号传播时间
(rtt)定位。对于rtt定位,这涉及取得ue和多个基站之间的rtt测量。
37.图2示出了5g nr定位系统200的示图,其解说了实现5g nr的定位系统(例如,定位系统100)的实施例。5g nr定位系统200可被配置成通过使用接入节点210、214、216(其可对应于图1的基站120和接入点130)以及(可任选地还有)lmf 220(其可对应于位置服务器160)实现一种或多种定位方法来确定ue 205的位置。此处,5g nr定位系统200包括ue 205、以及5g nr网络的各组件,这些组件包括下一代(ng)无线电接入网(ran)(ng-ran)235和5g核心网(5g cn)240。5g网络也可被称为nr网络;ng-ran 235可被称为5g ran或nr ran;并且5g cn 240可被称为ng核心网。ng-ran和5g cn的标准化正在3gpp中进行。相应地,ng-ran 235和5g cn 240可以遵循用于来自3gpp的5g支持的当前或将来标准。5g nr定位系统200还可以利用来自gnss系统(如全球定位系统(gps))或类似系统)的gnss卫星110的信息。下文描述了5g nr定位系统200的附加组件。5g nr定位系统200可包括附加或替换组件。
38.应当注意,图2仅提供了各种组件的一般化解说,其中任何或全部组件可被恰适地利用,并且每个组件可按需重复或省略。具体地,尽管仅解说了一个ue 205,但是将理解,许多ue(例如,数百、数千、数百万等)可利用5g nr定位系统200。类似地,5g nr定位系统200可包括更大(或更小)数目的gnss卫星110、gnb 210、ng-enb 214、wlan 216、接入和移动性功能(amf)215、外部客户端230和/或其他组件。将5g nr定位系统200中的各个组件相连接的所解说连接包括数据和信令连接,其可包括附加(中间)组件、直接或间接的物理和/或无线连接、和/或附加网络。此外,可取决于期望的功能性而重新布置、组合、分离、替换和/或省略各组件。
39.ue 205可包括和/或被称为设备、移动设备、无线设备、移动终端、终端、移动站(ms)、启用安全用户面定位(supl)的终端(set)或某个其他名称。此外,ue 205可对应于蜂窝电话、智能电话、膝上型设备、平板设备、个人数据助理(pda)、跟踪设备、导航设备、物联网(iot)设备或某个其他便携式或可移动设备。通常情况下,尽管不是必须的,ue 205可以使用一种或多种无线电接入技术(rat)(诸如使用全球移动通信系统(gsm)、码分多址(cdma)、宽带cdma(wcdma)、长期演进(lte)、高速率分组数据(hrpd)、ieee 802.11蓝牙、微波接入全球互通(wimax
tm
)、5g nr(例如,使用ng-ran 235和5g cn 240)等)来支持无线通信。ue 205还可使用可连接到其他网络(诸如因特网)的wlan 216(类似于一种或多种rat,并且如先前参考图1所提到的)来支持无线通信。使用这些rat中的一者或多者可允许ue 205(例如,经由图2中未示出的5g cn 240的元件、或者可能经由网关移动位置中心(gmlc)225)与外部客户端230通信和/或允许外部客户端230(例如,经由gmlc 225)接收关于ue 205的位置信息。
40.ue 205可包括单个实体或者可包括多个实体,诸如在其中用户可采用音频、视频、和/或数据i/o设备、和/或身体传感器以及分开的有线或无线调制解调器的个域网中。对ue 205的位置的估计可被称为位置、位置估计、位置锁定、锁定、定位、定位估计或定位锁定,并且可以是大地式的,从而提供关于ue 205的位置坐标(例如,纬度和经度),其可包括或可不包括海拔分量(例如,海拔高度;地平面、楼板平面或地下室平面以上高度或以下深度)。替换地,ue 205的位置可被表达为市政位置(例如,表达为邮政地址或建筑物中某个点或较小区域的指定(诸如特定房间或楼层))。ue 205的位置也可被表达为ue 205预期以某个概率或置信度(例如,67%、95%等)位于其内的(大地式地或以市政形式来定义的)区域或体积。
ue 205的位置可进一步是相对位置,该相对位置包括例如相对于某个在已知位置处的原点定义的距离和方向或者相对x、y(和z)坐标,该已知位置可以是大地式地、以市政形式或者参考在地图、楼层平面图或建筑物平面图上指示的点、区域或体积来定义的。在本文中所包含的描述中,术语位置的使用可包括这些变体中的任一者,除非另行指出。在计算ue的位置时,通常求解出局部x、y以及可能还有z坐标,并且随后在需要的情况下将局部坐标转换成绝对坐标(例如,关于纬度、经度和在平均海平面以上或以下的海拔)。
41.图2中所示的ng-ran 235中的基站可对应于图1中的基站120,并且可包括nr b节点(gnb)210-1和210-2(在本文中被一般性地统称为gnb 210)、和/或gnb的天线。ng-ran 235中的成对gnb 210可以相互连接(例如,如图2中示出的直接连接或经由其他gnb 210间接连接)。经由ue 205与一个或多个gnb 210之间的无线通信来向ue 205提供对5g网络的接入,该一个或多个gnb 210可使用5g nr代表ue 205提供对5g cn 240的无线通信接入。5g nr无线电接入也可被称为nr无线电接入或5g无线电接入。在图2中,假设ue 205的服务gnb是gnb 210-1,但其他gnb(例如,gnb 210-2)在ue 205移动到另一位置的情况下可充当服务gnb,或者可充当副gnb来向ue 205提供附加吞吐量和带宽。
42.图2中示出的ng-ran 235中的基站可以另外地或替代地包括下一代演进型b节点(也被称为ng-enb)214。ng-enb 214可以连接到ng-ran 235中的一个或多个gnb 210—例如,直接连接或经由其他gnb 210和/或其他ng-enb间接连接。ng-enb 214可向ue 205提供lte无线接入和/或演进型lte(elte)无线接入。图2中的一些gnb 210(例如,gnb 210-2)和/或ng-enb 214可被配置成用作仅定位信标台,其可传送信号(例如,定位参考信号(prs))和/或可以广播辅助数据以辅助对ue 205的定位,但是可能不会从ue 205或从其他ue接收信号。注意,虽然在图2中示出了仅一个ng-enb 214,但是一些实施例可包括多个ng-enb 214。基站210、214可经由xn通信接口彼此直接通信。附加地或替换地,基站210、214可经由5g nr定位系统200的另一组件(诸如lmf 220)间接地通信。
43.5g nr定位系统200还可包括一个或多个wlan 216,其可连接到5g cn 240中的非3gpp互通功能(n3iwf)250(例如,在不受信任wlan 216的情形中)。例如,wlan 216可支持针对ue 205的ieee 802.11wi-fi接入并且可包括一个或多个wi-fi ap(例如,图1的ap 130)。此处,n3iwf 250可连接到5g cn 240中的其他元件,诸如amf 215。在一些实施例中,wlan 216可以支持另一rat,诸如蓝牙。n3iwf 250可以提供对于ue 205对5g cn 240中的其他元件的安全接入的支持和/或可以支持由wlan 216和ue 205使用的一个或多个协议与由5g cn 240的其他元件(诸如amf 215)使用的一个或多个协议的互通。例如,n3iwf 250可以支持:与ue 205建立ipsec隧道,终接与ue 205的ikev2/ipsec协议,终接分别用于控制面和用户面的至5g cn 240的n2和n3接口,中继ue 205与amf 215之间跨n1接口的上行链路和下行链路控制面非接入阶层(nas)信令。在一些其他实施例中,wlan 216可以直接连接到5g cn 240中的元件(例如,如由图2中的虚线所示的amf 215),而不经由n3iwf 250——例如,在wlan 216对于5g cn 240是受信任wlan的情况下。注意,尽管在图2中仅示出了一个wlan 216,但是一些实施例可包括多个wlan 216。
44.接入节点可包括使得能够在ue 205与amf 215之间进行通信的各种各样的网络实体中的任一者。这可包括gnb 210、ng-enb 214、wlan 216和/或其他类型的蜂窝基站。然而,提供本文所描述的功能性的接入节点可以附加地或替换地包括使得能够与图2中未解说的
各种各样的rat中的任一者(其可包括非蜂窝技术)通信的实体。因此,如本文下面描述的实施例中所使用的,术语“接入节点”可包括但不必限于gnb 210、ng-enb 214或wlan 216。
45.在一些实施例中,接入节点(诸如gnb 210、ng-enb 214或wlan 216)(单独或与5g nr定位系统200的其他组件组合地)可被配置成响应于从lmf 220接收到对针对多个rat的位置信息的请求,取得针对该多个rat之一的测量(例如,ue 205的测量)和/或获得来自ue 205的、使用该多个rat中的一个或多个rat传递到接入节点的测量。如所提到的,虽然图2描绘了接入节点210、214和216被配置成分别根据5g nr、lte和wi-fi通信协议进行通信,但是可以使用被配置成根据其他通信协议进行通信的接入节点,诸如举例而言,使用针对通用移动电信服务(umts)地面无线电接入网(utran)的wcdma协议的b节点、使用针对演进型utran(e-utran)的lte协议的enb、或使用针对wlan的协议的蓝牙信标台。例如,在向ue 205提供lte无线接入的4g演进型分组系统(eps)中,ran可包括e-utran,其可包括包含支持lte无线接入的enb的基站。用于eps的核心网可包括演进型分组核心(epc)。随后,eps可包括e-utran加上epc,其中在图2中,e-utran对应于ng-ran 235且epc对应于5g cn 240。本文所描述的用于使用共用或通用定位规程进行ue 205定位的方法和技术可以适用于此类其他网络。
46.gnb 210和ng-enb 214可以与amf 215进行通信,为了定位功能性,amf 215与lmf 220通信。amf 215可支持ue 205的移动性,包括ue 205从第一rat的接入节点210、214或216到第二rat的接入节点210、214或216的蜂窝小区改变和切换。amf 215还可以参与支持至ue 205的信令连接以及可能支持针对ue 205的数据和语音承载。lmf 220可在ue 205接入ng-ran 235或wlan 216时支持对ue 205的定位,并且可支持各种定位规程和方法,包括ue辅助式/基于ue、和/或/基于网络的规程/方法,诸如受辅助式gnss(a-gnss)、观察抵达时间差(otdoa)(其在nr中可被称为抵达时间差(tdoa))、实时运动学(rtk)、精确点定位(ppp)、差分gnss(dgnss)、ecid、抵达角(aoa)、出发角(aod)、wlan定位、和/或其他定位规程和方法。lmf 220还可处理例如从amf 215或从gmlc 225接收的对ue 205的位置服务请求。lmf 220可被连接到amf 215和/或gmlc 225。lmf 220可以用其他名称来称呼,诸如位置管理器(lm)、位置功能(lf)、商用lmf(clmf)、或增值lmf(vlmf)。在一些实施例中,实现lmf 220的节点/系统可附加地或替换地实现其他类型的定位支持模块,诸如演进型服务移动位置中心(e-smlc)或服务位置协议(slp)。注意到,在一些实施例中,定位功能性(包括确定ue的位置)的至少一部分可以在ue 205处执行(例如,通过处理无线节点(诸如gnb 210、ng-enb 214和/或wlan 216)所传送的下行链路prs(dl-prs)信号和/或使用例如由lmf 220提供给ue 205的辅助数据)。
47.网关移动位置中心(gmlc)225可支持从外部客户端230接收到的对ue 205的位置请求,并且可将此类位置请求转发给amf 215以供由amf 215转发给lmf 220,或者可将该位置请求直接转发给lmf 220。来自lmf 220的位置响应(例如,包含ue 205的位置估计)可以类似地直接或经由amf 215返回给gmlc 225,并且gmlc 225随后可将该位置响应(例如,包含该位置估计)返回给外部客户端230。gmlc 225被示为连接至图2中的amf 215和lmf 220两者,但是在一些实现中,这些连接中的仅一个连接可被5g cn 240支持。
48.如图2中进一步解说的,lmf 220可使用lppa协议(其还可被称为nrppa或nppa)来与gnb 210和/或与ng-enb 214进行通信。nr中的lppa协议可以与lte中的(与lte定位协议
(lpp)相关的)lppa协议相同、类似或是其扩展,其中lppa消息经由amf 215来在gnb 210与lmf 2220之间传递、和/或在ng-enb 214与lmf 220之间传递。如图2中进一步解说的,lmf 220和ue 205可以使用lpp协议进行通信。lmf 220和ue 205还可以或替代地使用lpp协议(其在nr中也可被称为nrpp或npp)进行通信。此处,可经由amf 215以及ue 205的服务gnb 210-1或服务ng-enb 214来在ue 205与lmf 220之间传递lpp消息。例如,lpp和/或lpp消息可以使用用于基于服务的操作(例如,基于超文本传输协议(http))的消息来在lmf 220与amf 215之间传递,并且可以使用5g nas协议来在amf 215与ue 205之间传递。lpp和/或lpp协议可被用于支持使用ue辅助式和/或基于ue的定位方法(诸如a-gnss、rtk、tdoa和/或增强型蜂窝小区id(ecid))来定位ue 205。lppa协议可被用于支持使用基于网络的定位方法(诸如ecid)(当与由gnb 210或ng-enb 214获得的测量一起使用时)来定位ue 205和/或可由lmf 220用来获得来自gnb 210和/或ng-enb 214的位置相关信息,诸如定义来自gnb 210和/或ng-enb 214的dl-prs传输的参数。
49.在ue 205接入wlan 216的情形中,lmf 220可以使用lppa和/或lpp以类似于刚才针对ue 205接入gnb 210或ng-enb 214所描述的方式来获得ue 205的位置。由此,可以经由amf 215和n3iwf 250来在wlan 216与lmf 220之间传递lppa消息,以支持对ue 205的基于网络的定位和/或将其他位置信息从wlan 216传递到lmf 220。替换地,可以经由amf 215来在n3iwf 250与lmf 220之间传递lppa消息,以基于n3iwf 250已知或可访问的并且使用lppa从n3iwf 250传递到lmf 220的位置相关信息和/或位置测量来支持对ue 205的基于网络的定位。类似地,可以经由amf 215、n3iwf 250、以及ue 205的服务wlan 216来在ue 205与lmf 220之间传递lpp和/或lpp消息,以支持由lmf 220进行对ue 205的ue辅助式或基于ue的定位。
50.在5g nr定位系统200中,定位方法可以被分类为“ue辅助式”或“基于ue的”。这可取决于对确定ue 205的位置的请求源自何处。例如,如果该请求源自ue(例如,来自ue执行的应用或即“app”),则定位方法可以被分类为基于ue的。另一方面,如果该请求源自外部客户端或af 230、lmf 220或5g网络内的其他设备或服务,则定位方法可以被分类为ue辅助式(或“基于网络的”)。
51.利用ue辅助式定位方法,ue 205可以获得位置测量并且将这些测量发送给位置服务器(例如,lmf 220)以用于计算对ue 205的位置估计。对于取决于rat的定位方法,位置测量可包括针对gnb 210、ng-enb 214和/或wlan 216的一个或多个接入点的以下一者或多者:收到信号强度指示符(rssi)、往返信号传播时间(rtt)、参考信号收到功率(rsrp)、参考信号收到质量(rsrq)、参考信号时间差(rstd)、抵达时间(toa)、aoa、接收时间-传输时间差(rx-tx)、差分aoa(daoa)、aod、或定时提前(ta)。附加地或替换地,可以对其他ue传送的侧链路信号进行类似测量,这些其他ue可在这些其他ue的位置是已知的情况下用作定位ue 205的锚点。位置测量可以另外地或替代地包括针对rat无关的定位方法的测量,诸如gnss(例如,关于gnss卫星110的gnss伪距、gnss码相位和/或gnss载波相位)、wlan等。
52.利用基于ue的定位方法,ue 205可以获得位置测量(例如,其可以与ue辅助式定位方法的位置测量相同或相似),并且可以进一步计算ue 205的位置(例如,借助于从位置服务器(诸如lmf 220、slp)接收到的或由gnb 210、ng-enb 214或wlan 216广播的辅助数据)。
53.利用基于网络的定位方法,一个或多个基站(例如,gnb 210和/或ng-enb 214)、一
个或多个ap(例如,wlan 216中的ap)、或n3iwf 250可以获得对由ue 205传送的信号的位置测量(例如,rssi、rtt、rsrp、rsrq、aoa或toa的测量),和/或可以接收由ue 205或在n3iwf 250的情形中由wlan 216中的ap获得的测量,并且可以将这些测量发送到位置服务器(例如,lmf 220)以用于计算关于ue 205的位置估计。
54.ue 205的定位还可取决于用于定位的信号的类型而被分类为基于上行链路(ul)的、基于下行链路(dl)的或基于下行链路-上行链路(dl-ul)的。例如,如果定位仅基于在ue 205(例如,从基站或其他ue)接收到的信号,则该定位可以被分类为基于dl的。另一方面,如果定位仅基于由ue 205传送的信号(其可以由例如基站或其他ue接收),则该定位可以被分类为基于ul的。基于dl-ul的定位包括基于由ue 205传送和接收的信号的定位,诸如基于rtt的定位。侧链路(sl)辅助式定位包括在ue 205与一个或多个其他ue之间传达的信号。根据一些实施例,本文所描述的ul、dl或dl-ul定位可以能够将sl信令用作sl、dl或dl-ul信令的补充或替换。
55.取决于定位类型(例如,基于ul的、基于dl的或基于dl-ul的),所使用的参考信号类型可不同。例如,对于基于dl的定位,这些信号可包括prs(例如,由基站传送的dl-prs或由其他ue传送的sl-prs),其可被用于tdoa、aod和rtt测量。可被用于定位(ul、dl或dl-ul)的其他参考信号可包括:探通参考信号(srs)、信道状态信息参考信号(csi-rs)、同步信号(例如,同步信号块(ssb)同步信号(ss))、物理上行链路控制信道(pucch)、物理上行链路共享信道(pusch)、物理侧链路共享信道(pssch)、解调参考信号(dmrs)等。此外,参考信号可以在tx波束中传送和/或在rx波束中接收(例如,使用波束成形技术),这可影响角度测量,诸如aod和/或aoa。
56.图3是根据一些实施例的对可如何执行基于tdoa的定位的解说。基于tdoa的定位使用trp 310-1、310-2和310-3(在本文中被共同且一般性地称为trp 310)与ue 305之间的无线信令来确定ue 305的位置。此处,trp 320可对应于如先前图1和2中所描述和解说的基站120、gnb 210和/或ng-enb 214。简言之,基于tdoa的定位使用trp 320的已知位置以及发送给或接收自ue 305的信号之间的时间差来确定ue 305的位置。具体而言,下行链路prs(dl-prs)使用从trp 320被发送给ue 305的信号的时间差,并且上行链路prs(ul-prs)使用从ue 305被发送给trp 320的信号的时间差。
57.在基于tdoa的定位中,位置服务器可以向ue 305提供关于参考trp(其可以被称为“参考蜂窝小区”或“参考资源”)和相对于该参考trp的一个或多个相邻trp(其可以被称为“邻居蜂窝小区”或“相邻蜂窝小区”,并且其可以单独被称为“目标蜂窝小区”或“目标资源”)的tdoa辅助数据。例如,辅助数据可以提供每个trp的中心信道频率、各种prs配置参数(例如,trp长度、周期性、静默序列、跳频序列、prs id、prs带宽)、基站(蜂窝小区)全局id、与定向prs相关联的prs信号特性、和/或其他适用于tdoa或某种其他定位方法的trp相关参数。通过在tdoa辅助数据中指示针对ue 305的服务trp(例如,其中参考trp被指示为服务trp),可以促成由ue 105进行的基于tdoa的定位。对于dl-tdoa,tdoa辅助数据还可包括“预期参考信号时间差(rstd)”参数连同该预期rstd参数的不确定性,这些“预期rstd”参数向ue 305提供关于预期该ue 305处于其当前位置在参考trp与每个邻居trp之间测得的rstd值的信息。预期rstd连同相关联的不确定性可定义用于ue 305的搜索窗口,预期该ue 305在该搜索窗口内测量rstd值。dl-tdoa辅助信息还可包括prs配置信息参数,这些参数允许
ue 305确定相对于针对参考trp的prs定位时机,何时在从各个邻居trp接收到的信号上发生prs定位时机,并且确定从各个trp传送的prs序列,以便测量抵达时间(toa)或rstd。toa测量可以是携带prs(或其他参考信号)的资源元素(re)的平均功率的rsrp(参考信号收到功率)测量。
58.使用rstd测量、每个trp的已知绝对或相对传输定时、以及参考trp和相邻trp的无线节点物理发射天线的(诸)已知定位,可以(例如,由ue 305或位置服务器)计算ue位置。更具体地,邻居trp“k”相对于参考trp“ref”的rstd可被给定为来自每个trp的信号的toa测量中的差异(即,toak–
toa
ref
),其中toa值可以通过对一个子帧历时(1ms)取模来测量,以移除在不同时间测量不同子帧的影响。在图3中,例如,第一trp 310-1可被指定为参考trp,并且第二和第三trp(310-2和310-3)是邻居trp。如果ue 305分别在时间t1、t2和t2从第一trp 310-1、第二trp 310-2和第三trp 310-3接收参考信号,则针对第二trp 310-2的rstd测量将被确定为t2-t1,针对第三trp 310-3的rstd测量将被确定为t3-t1。rstd测量可以由ue 305使用和/或发送到位置服务器以使用(i)rstd测量、(ii)每个trp的已知绝对或相对传输定时、(iii)针对参考trp和相邻trp的trp 310的(诸)已知位置、和/或(iv)定向prs特性(诸如传输方向)来确定ue 305的位置。在几何上,信息(i)-(iv)允许针对每个rstd确定ue 305的可能位置(其中每个rstd导致双曲线,如图3所示),并且允许从针对所有rstd的可能位置的交集确定ue 305的位置。
59.ul-tdoa定位使用与上述dl-tdoa类似的过程。然而,ue 305可以传送由trp 320测量的一个或多个参考信号,而不是在ue 305处进行rstd测量。trp接收到信号的时间的差异(计及不同信号的传输之间的时间差)可以被用于确定ue 305的位置。提供给ue 305的用于ul-tdoa的辅助数据可包括用于传送一个或多个参考信号的prs配置参数(类似于以上关于dl-tdoa所描述的那些参数)。
60.图4是根据一些实施例的对可如何执行基于rtt的定位(或多rtt)的解说。简言之,基于rtt的定位包括其中基于trp(例如,trp 420)和/或具有已知位置的其他设备(例如,其他ue)的已知定位、以及ue 405与这些trp和/或其他设备之间的所确定距离来确定ue 405的定位的定位方法。ue 405和每个trp/设备之间的rtt测量被用于确定ue 405与相应trp之间的距离,并且多边定位可以被用于确定ue 405的位置。可以注意到,在替换实施例中,具有已知位置的其他设备(例如,其他ue、其他类型的trp等)可作为图4中所解说的trp 420的补充或替换来使用。
61.在基于rtt的定位中,位置服务器可协调ue 405和每个trp之间的rtt测量。提供给ue 405的信息可被包括在rtt辅助数据中。这可包括例如参考信号(例如,prs)定时和其他信号特性、trp(蜂窝小区)id和/或其他适用于多rtt或某种其他定位方法的trp相关参数。取决于期望的功能性,rtt测量可以由ue 405或trp 410执行(和发起)。
62.rtt测量使用空中(ota)延迟来测量距离。发起方设备(例如,ue 405或trp 410)在第一时间t1传送第一参考信号,第一参考信号传播到响应方设备。在第二时间t2,第一参考信号抵达该响应方设备。ota延迟(即,第一参考信号从发起方设备行进至响应方设备所花费的传播时间)是t1和t2之差。响应方设备随后在第三时间t3传送第二参考信号,并且第二参考信号在第四时间t4由发起方设备接收和测量。rsrp测量可被用于针对时间t2和t4确定toa。因此,发起方设备与响应方设备之间的距离d可以使用下式来确定:
[0063][0064]
(如将领会的,距离d除以rf传播速度c等于ota延迟)。因此,可以执行对发起方设备与响应方设备之间的距离的精确确定。
[0065]
ue 405和trp 410之间的rtt测量因此可以允许使用多边定位来确定ue 405的定位。即,ue 405与第一trp 410-1、第二trp 210-2和第三trp 410-3之间的rtt测量(分别是rtt测量rtt1、rtt2和rtt3)导致ue 405与trp 410中的每一者的距离的确定。这些距离可被用于绘出围绕trp 410的已知定位的圆(其中圆1对应于trp 410-1,圆2对应于trp 410-2,并且圆3对应于trp 410-3)。ue 405的定位可被确定为这些圆之间的交点。
[0066]
因为tdoa、rtt和其他定位方法基于精确定时,所以该定时中的误差会影响使用这些方法所估计的ue定位的准确性。这些误差可包括网络同步误差(例如,trp之间的同步)、ue或trp处的传输定时误差(tx误差)、以及ue或trp处的接收定时误差(rx误差)。这些误差可能以不同方式影响不同的定位方法。表1中提供了对不同的定位方法如何受到不同定时误差的影响的概述。
[0067][0068]
表1:定位方法对定时误差的敏感性
[0069]
如表1中可见,网络同步误差会影响基于tdoa的定位,并且传输定时误差和接收定时误差对基于tdoa的定位、基于rtt的定位和基于差分rtt的定位有不同的影响。值得注意的是,基于双差分rtt的定位不会受到这些定时误差中的任一者的影响。
[0070]
表1中的定时误差对双差分rtt没有影响的原因与利用来自具有已知位置的trp的rtt测量有关。以下描述中的图5有助于说明原因。
[0071]
图5是其中可以进行双差分rtt的配置500的简化图。此处,ue 505的定位可以使用所解说的各种组件之间的rtt测量来确定,其中rtt测量是使用沿由箭头510-540示出的路径行进的无线信号进行的。具体地,作出ue 505和trp
ref 550之间的rtt测量rtt
ref 510,并且作出ue 505和trp
i 560之间的rtt测量rtt
i 520。此外,如所提到的,各实施例进一步利用
由具有已知位置的附加trp(trp
j 570)进行的rtt测量。具体地,作出trp
j 570和trp
ref
550之间的rtt测量rtt’ref
j 530,并且作出trp
j 570和trp
i 560之间的rtt测量rtt’ref
j 540。通过使用来自这些rtt测量的信息,可以移除由ue侧群延迟和trp侧群延迟两者引起的传输定时误差和接收定时误差。更具体地,因为trp
j 570相对于trp
i 560和trp
ref 550的精确定位是已知的,所以可以计算出传播时间并将其从测量rtt’ref
j 530和rtt’ref
j 540中移除。这些测量中的此类剩余定时误差随后可在确定ue 505的定位时进行校准。
[0072]
可以注意到,可使用除该附加trp(trp
j 570)之外的其他无线节点。例如,可按类似方式在ue 505的基于双差分rtt的定位确定中使用具有已知位置的另一ue。为了按这种方式执行双差分rtt,无线节点可能需要(1)传送和接收用于执行rtt测量的参考信号(如图5中所示),以及(2)具有执行rtt测量的处理能力。
[0073]
这两个要求可能导致对ue 505的双差分rtt定位的限制。可能存在其中期望ue 505的经估计定位的情境,例如,在附加trp或其他无线节点不可用的情况下、在另一无线节点的定位是未知的情况下、和/或在附加trp或其他无线节点不能够留出处理能力或其他资源以执行双差分rtt定位的情况下。
[0074]
通过利用部署在无线通信网络内的可重构智能表面(ris),各实施例解决了与双差分rtt和其他定位方法相关的这些或其他问题。图6和下面随附的描述提供了关于在无线通信网络中使用ris来定位ue 505的一些附加细节。
[0075]
图6是根据实施例的配置的简化图,其中可在ris 625的辅助下进行对ue 605的定位。未标记的箭头表示通信链路。ue 605与位置服务器160之间的通信可以经由基站120中的一者或多者或经由ue 605与网络170之间的另一通信链路(未示出)来发生。(如本文中所使用的,对ue 605的“ris辅助式”定位是指使用ris 625的对ue 605的定位。)
[0076]
ris(也可被称为软件控制的超表面、智能反射表面、或可重构反射阵列/超表面)作为一种使rf信号的传播路径能够在阻塞物周围的手段,最近在无线通信应用中引起了关注。尽管ris 625可以是无源设备,但它可包括阵列并且因此可使用波束成形来重定向rf信号。如此,ris 625可以使得trp 620(或者更宽泛而言,trp 620的无线网络)的无线覆盖能够扩展到例如由阻塞物615引起的原本不可达的区域。ris 625可以通过以下操作来这样做:使用软件控制的反射/散射剖面来实时地将无线信号重定向到ue 605。附加地或替换地,ris 625可通过接收由trp 620-1传送的信号并将其定向至ue 605来充当中继器。(如本文中所使用的,“定向”、“重定向”、“反射”以及在指代ris 625的功能性时使用的类似术语可以指ris的反射和/或中继功能性)。ris 625的功能性可以由trp 620-1使用控制信道来控制,尽管替换实施例可使得位置服务器160和/或ue 605能够控制ris 625。在任一情形中,这向trp 620-1与ue 605之间的信道添加可控路径,这在具有严重阻塞物615的环境中是有用的。因此,出于定位目的,可在trp 620-1和ue 605之间传达rf信号610-1,从而实现dl、ul和dl-ul类型的定位,包括图3和4中所解说的基于rtt和基于tdoa的定位的经修改版本。
[0077]
然而,就双差分rtt定位而言,对ris的应用可能不是直截了当的。如先前所提到的,以往形式的双差分rtt定位使用了能够传送/接收信号以及对它们进行处理的无线节点。ris通常是不能靠自己传送/接收信号的无源设备。此外,ris通常几乎没有或没有信号处理能力。然而,在被部署时,ris具有已知位置。
[0078]
通过使用可以经由利用ris的信号反射/波束成形能力和已知位置、连同ue 605的处理和传输/接收能力一起来帮助减少或消除trp侧定时误差(同步误差和群延迟误差两者)的ota校准方案,本文的各实施例解决了这些和其他问题。以此方式,各实施例可以实现具有trp侧定时误差消去的基于双差分rtt的ris辅助式定位和基于dl/ul tdoa的ris辅助式定位。后文关于图7-12提供了细节。
[0079]
图7是根据实施例的配置的简化图,其中可在ris 708的辅助下进行对ue 705的基于双差分rtt的定位。此处,虚线和点线表示与新rtt测量相对应的传送给ris 708和从ris 708反射的无线参考信号(rf信号)。配置700可能看起来在各方面类似于图5的配置500。然而,重要的是,处理和信号传输/接收由其他实体执行,从而实现定时误差消去。
[0080]
trp 750和760处的群延迟可以如下根据由ue 705进行的rtt测量来数学地定义:
[0081]
gd
diff,trpi_ref
=gd
trpi-gd
trpref
=rtt
i-rtt
ref-(t
trpi_ue
),
ꢀꢀ
(2)
[0082]
其中gd
trpi
是trp
i 760处的群延迟,gb
trpref
是trp
ref 750处的群延迟,并且gd
diff,trpi_ref
是这两个延迟之差。如式(2)中进一步指示的,这可以通过从rtti和rtt
ref
之差中减去t
trpi_ue
来进一步计算,其中t
trpi_ue
是trp
i 760和ue 705之间的双倍传播时间与trp
ref 750和ue 705之间的双倍传播时间之差。在二维中,这可被计算为:
[0083][0084]
其中(x
trpi
,y
trpi
)、(x
trpref
,y
trpref
)和(x
ue
,y
ue
)是trp
i 760、trp
ref 750和ue 705的相应(x,y)坐标,并且c是光速。可以注意到,式(3)和本文中使用x和y坐标的其他等式用于2维定位。本领域普通技术人员将领会,此类等式可通过添加z坐标来被修改成用于3维定位,z坐标可按与x和y坐标类似的方式来使用。
[0085]
trp 750和760处的群延迟还可以如下根据经由ris 708进行的rtt测量来数学地定义:
[0086]
gd
diff,trpi_ref
=gd
trpi-gd
trpref
=rtt
′
i_ris-rtt
′
ref_ris-(t
trpi_ris
).
ꢀꢀ
(4)
[0087]
此处,t
trp_i_ris
是(i)trp
i 760和ris 708之间的双倍传播时间与(ii)trp
ref 750和ris 708之间的双倍传播时间之差。在二维中,这可被计算为:
[0088][0089]
其中(x
ris
,y
ris
)是ris 708的相应(x,y)坐标。
[0090]
值得注意的是,式(4)或(5)中未包括无线参考信号780在ris 708和ue 705之间行进的传播时间,这是因为这些传播时间基本上相同,并因此在计算差rtt
′
i_ris-rtt
′
ref_ris
时相互抵消。ris 708处的任何群延迟对于经由ris 708取得的rtt测量将是共同的,并因此类似地被抵消。此外,ris辅助式rtt测量rtt
′
i_ris
和rtt
′
ref_ris
可以基于ue的rx-tx时间差测量(适用3gpp标准中使用的报告)来测得,从而利用ue的处理能力来校准ris有限的基带处理能力,从而使得能够取得rtt测量。
[0091]
通过使用式(2)和(4),ue侧群延迟和每对trp之间的群延迟差两者都可被移除:
[0092]
t
trpi_ue-t
trpi_ris
=rtt
i-rtt
ref-(rtt
′
i_ris-rtt
′
ref_ris
).
ꢀꢀꢀ
(6)
[0093]
因为trp
i 760、trp
ref 750和ris 708的所有rtt测量和(x.y)坐标都是已知的,所以这使ue 705的(x,y)坐标留为式(3)、(5)和(6)中仅有的未知变量。由此,可以确定ue 705的带有群延迟定时误差校正的基于双差分rtt的ris辅助式定位。
[0094]
相较于使用图5的配置500的双差分rtt确定,通过图7的配置700执行的ris辅助式双差分rtt不需要引入跨trp的prs传输/接收。根据一些实施例,dl-prs和ul-srs可被用于执行rtt测量,并因此各实施例可能不需要引入跨多个trp的prs传输/接收。最终,用于rtt定位的传统规程可以在很大程度上被重用。
[0095]
附加地,为了帮助确保所取得的各种多个rtt测量之间的共同硬件群延迟,各实施例可确保rtt测量(例如,dl-prs/ul-srs传输)发生在某个时间阈值内。这可取决于trp、ue或ris在某个时间量内维持群延迟校准的能力。例如,向调度用于rtt测量的参考信号的位置服务器提供特定ris 708在某个时间量内维持群延迟校准的能力(例如,在y毫秒期间的x纳秒内维持群延迟变化的能力),并且该位置服务器随后可以相应地(例如,在y毫秒内)调度参考信号。例如,位置服务器随后可基于ris 708的在10毫秒期间的1纳秒内维持群延迟变化的所报告能力,在10毫秒内通过ris 708调度用于rtt测量的两对dl-prs/ul-srs传输。当然,ris能力可以逐ris地变化。ris的能力可通过连接的trp(例如,trp
i 760或trp
ref 750)被报告到一位置,其可基于该trp可能在该ris最初被部署时已经收到的静态信息和/或从该ris接收的动态信息来报告群延迟能力。trp可在ue与位置服务器之间的要执行ris辅助式双差分rtt的定位会话开始时或接近开始时或者在ue或位置服务器请求ris辅助式双差分rtt定位时报告静态群延迟信息。
[0096]
一些实施例可进一步将双差分校正扩展到其他类型的定位,作为rtt定位的补充或替换。
[0097]
图8是配置800的示图,其中可以在计及在使用ris 808的情况下网络同步误差和trp tx定时误差(例如,硬件群延迟)的影响时进行对ue 805的dl-tdoa定位。此处,rstd测量误差包括网络同步误差和trp tx定时误差,并且可如下数学地定义:
[0098]
rstd
error
=rstd
ris-(t
trpi_ris
),ꢀ ꢀꢀ (7)
[0099]
其中rstd
ris
是由ue 808进行的对由ris 808反射并在ue 805处接收的两个参考信号830和840(例如,dl-prs)之间的时间差进行测量的rstd测量。项t
trpi_ris
是(i)trp
i 860和ris 808之间的传播时间与(ii)trp
ref 850和ris 808之间的传播时间之差。因为trp 850、860和ris 808的位置是已知的,所以这可如下计算:
[0100][0101]
其中(x
trpi
,y
trpi
)、(x
trpref
,y
trpref
)和(x
ris
,y
ris
)是trp
i 860、trp
ref 850和ue 808的相应(x,y)坐标,并且c是光速。因为所有这些项都是已知的,所以可以确定t
trpi_ris
,从而使得ue 805能够进一步确定rstd
error
。
[0102]
与先前所描述的ris辅助式双差分rtt示例一样,式(8)中未包括无线参考信号880在ris 808和ue 805之间行进的传播时间,这是因为这些传播时间基本上相同,并因此相互抵消。ris 808处的任何群延迟对于经由ris 808取得的rtt测量将是共同的,并因此类似地被抵消。
[0103]
为了帮助确保所取得的各种多个rtt测量之间的共同硬件群延迟,各实施例可确保参考信号830和840的传输发生在某个时间阈值内。这可以按与先前所描述的ris辅助式双差分rtt示例类似的方式来完成。
[0104]
从ue 805的定位中移除rstd
error
可以按各种方式中的任何方式进行,这取决于期望的功能性。第一选项可涉及ue 805报告应当通过服务蜂窝小区向位置服务器报告rstd
error
。ue 805提供的报告可包括:针对每个收到参考信号的ris 808、trp(850,860)的id和ue 805id,以及时间戳。第二选项可涉及ue 805通过服务蜂窝小区向位置服务器报告所测得的rstd
ris
,从而允许位置服务器计算rstd
error
。同样,该报告可包括:针对每个收到参考信号的ris 808、trp(850,860)的id和ue 805id,以及时间戳。第三选项可涉及ue 805在本地进行rstd测量校准(例如,从所测得的rstd值中移除rstd
error
)并向位置服务器报告经校准的rstd。因此,该第三选项将在会对位置服务器完全透明的过程中校准rstd测量。
[0105]
图9是配置900的示图,其中可以在计及在使用ris 808的情况下网络同步误差和trp rx定时误差(例如,硬件群延迟)的影响时进行对ue 805的ul-tdoa定位。ul-tdoa定位基于由trp 950和960对从ue 905同时直接(直接无线参考信号910和920)和经由ris 908间接(无线参考信号930和940)发送的参考信号(例如,ul-srs)进行的ul-rtoa测量。ul-tdoa定位所基于的ul-tdoa测量中的误差可以如下数学地描述:
[0106]
ul_rtoa
error
=ul_rtoa
i_ris-ul_rtoa
ref_ris-(t
trpi_ris
).
ꢀꢀ
(9)其中ul_rtoa
i_ris
是trpi处对从ris 908反射的信号940的ul-tdoa测量;并且ul_rtoa
ref_ris
是trp
ref
处对从ris 908反射的信号930的ul-tdoa测量。项t
trpi_ris
是(i)trp
i 960和ris 908之间的传播时间与(ii)trp
ref 950和ris 908之间的传播时间之差。因为trp 950、960和ris 908的位置是已知的,所以这可如下计算:
[0107][0108]
其中(x
trpi
,y
trpi
)、(x
trpref
,y
trpref
)和(x
ris
,y
ris
)是trp
i 960、trp
ref 950和ue 908的相应(x,y)坐标,并且c是光速。因为所有这些项都是已知的,所以可以确定t
trpi_ris
,从而使得位置服务器能够进一步确定rstd
error
。
[0109]
为了实现该计算,在来自trp
i 960和trp
ref 950的报告中向位置服务器提供ul-rtoa测量。这些报告可包括:ris 908、trp 950、960和ue 905的id、连同时间戳。位置服务器随后可以基于这些所报告ul-rtoa来导出定时误差rstd
error
。位置服务器随后可以校准用于基于ul-tdoa的ue位置估计的每对ul-rtoa的rstd
error
。
[0110]
各实施例并不限于图7-9中所解说的配置700、800和900。例如,一些实施例可利用一个或多个附加trp和/或一个或多个附加ris。此类附加trp和ris可以按先前描述的实施例的方式来使用以获得附加测量,这些附加测量可(例如,通过对所确定测量、误差、定位确定等取平均)被用于提供甚至更准确的定时误差校准。
[0111]
图10是根据实施例的针对在移动设备的定位确定中使用的无线节点中的定时误差的ris辅助式校准的方法1000的流程图。用于执行图10中示出的框中的一者或多者中所解说的功能性的装置可以由移动设备(例如,ue 105)或计算机系统(例如,位置服务器160)的硬件和/或软件组件来执行。在图11中解说了移动设备的示例组件,在图12中解说了计算
机系统的示例组件,其将在下面更详细地描述。
[0112]
在框1010,该功能性包括获得无线参考信号测量集合,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量,对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量,对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量,以及对在该移动设备和第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量。如图7-9中所指示的,无线节点可包括trp。附加地或替换地,无线节点可包括例如具有已知位置的其他移动设备或ue。各实施例可允许具有作为无线节点的trp和/或移动设备的任何组合的配置。在这些无线节点中的一者或多者包括trp的情况下,第一和第二测量可包括移动设备和trp之间的ul、dl和/或ul-dl测量。第三和第四测量可包括对经由ris中继的信号的类似测量。ul测量可包括例如对由移动设备发送的参考信号(例如,ul-srs)的ul-rtoa测量,其可被用于移动设备的基于ul-tdoa的定位,如先前关于图9所描述的。dl测量可包括例如对由trp发送的参考信号(例如,dl-prs)的rstd测量,其可被用于移动设备的基于dl-tdoa的定位,如先前关于图8所描述的。ul-dl测量可包括例如对在ue和trp之间发送的信号(例如,ul-srs/dl-prs)的rtt测量,其可被用于移动设备的基于rtt的定位,如先前关于图7所描述的。在这些无线节点中的一者或多者包括移动设备的情况下,可进行sl测量来代替如先前所描述的ul、dl和/或ul-dl测量。在框1010的功能性由移动设备执行的实施例中,获得无线参考信号集合可包括取得诸测量中的一者或多者,这在一些实例中可包括:除参考信号之外,还与该一个或多个无线节点交换某些信息。替换地,在框1010的功能性由位置服务器执行的实施例中,获得无线参考信号测量集合可包括从无线节点和/或移动设备接收测量。
[0113]
用于执行框1010的功能性的装置可以包括例如如图11中所解说的总线1105、(诸)处理单元1110、数字信号处理器(dsp)1120、无线通信接口1130、存储器1160和/或移动设备的其他组件;或如图12中所解说的总线1205、(诸)处理单元1210、通信子系统1230、工作存储器1235和/或计算机系统的其他组件。
[0114]
在框1020,该功能性包括:获得包括第三测量与第四测量之间的差的差分值。该差分值可取决于被执行的测量/定位的类型而变化。例如,对于基于rtt的定位,差分值可包括对从ris反射的信号的rtt测量之间的差,如式(4)和(6)中所示。对于dl-tdoa定位,该差分值可包括第三与第四测量之间的时间差的rstd测量(其可包括参考信号的toa测量),如式(7)中所示。对于ul-tdoa定位,该差分值可包括在无线节点处进行的对从ris反射的信号的ul-tdoa(或sl-tdoa)测量之间的时间差,如式(9)中所示。
[0115]
同样,取决于执行框1020处的操作的设备,该操作本身可按不同的方式来执行。例如,位置服务器可获得来自无线节点和/或移动设备的计算出的差分值。替换地,位置服务器可接收由无线节点和/或移动设备进行的测量,随后基于这些测量来计算差分值。根据一些实施例,移动设备可通过以下方式来获得差分值:从诸无线节点中的一者或多者接收差分值,或者基于它自己的测量和/或接收自无线节点的测量来计算差分值。
[0116]
用于执行框1020处的功能性的装置可以包括例如如图11中所解说的总线1105、(诸)处理单元1110、dsp 1120、无线通信接口1130、存储器1160和/或移动设备的其他组件;或如图12中所解说的总线1205、(诸)处理单元1210、通信子系统1230、工作存储器1235和/
或计算机系统的其他组件。
[0117]
在框1030,该功能性包括至少部分地基于该无线参考信号测量集合、该差分值以及第一无线节点、第二无线节点和该ris中的每一者的相应位置来确定该移动设备的定位估计。例如,该确定可以如下进行:使用式(2)-(10)的与该类型的测量/定位相关的一部分来确定并校准定时误差,或者计算移动设备自身的定位。
[0118]
用于执行框1030的功能性的装置可以包括例如如图11中所解说的总线1105、(诸)处理单元1110、dsp 1120、无线通信接口1130、存储器1160和/或移动设备的其他组件;或如图12中所解说的总线1205、(诸)处理单元1210、通信子系统1230、工作存储器1235和/或计算机系统的其他组件。
[0119]
如所提到的,各实施例可包括各种附加特征中的任一者,这取决于期望的功能性。例如,根据一些实施例,方法1000可由与移动设备通信的计算机系统(例如,位置服务器)执行。如先前提到的,在此类实施例中,确定定位估计可包括:在计算机系统处接收由移动设备进行的测量。
[0120]
用于执行移动设备的基于rtt的定位的功能性可包括附加特征。在此类实施例中,第一测量、第二测量、第三测量和第四测量可各自包括相应的rtt测量。确定移动设备的定位估计可进一步包括:确定差分值与第二差分值之间的差,其中第二差分值包括第三测量与第四测量之间的差。在此类实施例中,方法1000可由移动设备或计算机服务器来执行。
[0121]
用于执行移动设备的基于dl-tdoa的定位的功能性可包括附加特征。例如,在此类实施例中,第一测量、第二测量、第三测量和第四测量中的每一者的一个或多个无线参考信号可包括由移动设备接收的dl参考信号或sl参考信号,并且差分值可包括基于第三测量和第四测量的rstd测量。在此类实施例中,确定移动设备的定位估计进一步包括至少部分地基于以下各项来估计定时误差:基于第三测量和第四测量的rstd测量,以及第一无线节点、第二无线节点和ris中的每一者的相应位置。移动设备可确定rstd测量并向计算机服务器发送rstd测量,移动设备可确定定时误差并向计算机服务器发送定时误差,或者移动设备自身可确定定位估计。
[0122]
用于执行移动设备的基于ul-tdoa的定位的功能性可包括附加特征。在此类实施例中,第一测量、第二测量、第三测量和第四测量中的每一者的一个或多个无线参考信号可各自包括由移动设备传送的ul参考信号或sl参考信号。第三测量可包括第一toa测量(例如,ul-rtoa),第四测量可包括第二toa测量(例如,ul-rtoa),并且差分值可包括第一toa测量与第二toa测量之间的时间差。在此类实施例中,确定移动设备的定位估计可进一步包括至少部分地基于以下各项来估计定时误差:差分值,以及第一无线节点、第二无线节点和ris中的每一者的相应位置。此外,在此类实施例中,方法1000可由计算机服务器执行。
[0123]
图11解说了移动设备1100的实施例,其可以被用作如本文上面(例如,联同图1-10)所描述的ue或移动设备。例如,移动设备1100可执行图10中所示的方法的一个或多个功能。应当注意,图11仅旨在提供各种组件的一般化解说,可恰适地利用其中任何或全部组件。此外,如先前提到的,在先前所描述的实施例中讨论的ue的功能性可以由图11中所示的硬件和/或软件组件中的一个或多个来执行。
[0124]
移动设备1100被示为包括可经由总线1105电耦合(或者可以恰适地以其他方式处于通信)的硬件元件。硬件元件可以包括(诸)处理单元1110,其可以包括但不限于一个或多
个通用处理器、一个或多个专用处理器(诸如dsp芯片、图形加速处理器、专用集成电路(asic)等等)、和/或其他处理结构或装置。如图11中所示,一些实施例可取决于期望的功能性而具有单独的dsp 1120。可以在(诸)处理单元1110和/或无线通信接口1130(在下面讨论)中提供基于无线通信的位置确定和/或其他确定。移动设备1100还可以包括一个或多个输入设备1170以及一个或多个输出设备1115,该一个或多个输入设备1170可包括但不限于:一个或多个键盘、触摸屏、触摸板、话筒、按键、拨号盘、开关等等;该一个或多个输出设备1115可包括但不限于一个或多个显示器(例如,触摸屏)、发光二极管(led)、扬声器等等。
[0125]
移动设备1100还可包括无线通信接口1130,该无线通信接口1130可包括但不限于调制解调器、网卡、红外通信设备、无线通信设备和/或芯片组(诸如设备、ieee 802.11设备、ieee 802.15.4设备、wi-fi设备、wimax设备、wan设备和/或各种蜂窝设备等)、等等,其可以使得该移动设备1100能够与如以上实施例中所描述的其他设备进行通信。无线通信接口1130可包括一个或多个无线收发机,该一个或多个无线收发机准许通过网络的基站/trp(例如包括enb、gnb、ng-enb)、接入点、各种基站、和/或其他接入节点类型、和/或其他网络组件、计算机系统、和/或如本文中所描述的与基站/trp通信地耦合的任何其他电子设备(ue/移动设备等)来传达(例如,传送和接收)数据和信令。可以经由发送和/或接收无线信号1134的一个或多个无线通信天线1132来执行通信。根据一些实施例,(诸)无线通信天线1132可以包括多个分立的天线、天线阵列或其任何组合。
[0126]
取决于所期望的功能性,无线通信接口1130可以包括单独的接收机和发射机,或收发机、发射机、和/或接收机的任何组合,以与基站/trp(例如,ng-enb和gnb)和其他地面收发机(诸如无线设备和接入点)进行通信。移动设备1100可以与不同的数据网络进行通信,这些数据网络可包括各种网络类型。例如,无线广域网(wwan)可以是cdma网络、时分多址(tdma)网络、频分多址(fdma)网络、正交频分多址(ofdma)网络、单载波频分多址(sc-fdma)网络、wimax(ieee 802.16)网络等等。cdma网络可以实现一个或多个rat,诸如cdma2000、wcdma等。cdma2000包括is-95、is-2000、和/或is-856标准。tdma网络可实现gsm、数字高级移动电话系统(d-amps)、或某个其他rat。ofdma网络可采用lte、高级lte、5g nr等等。在来自3gpp的文档中描述了5g nr、lte、高级lte、gsm、以及wcdma。cdma2000在来自名为“第三代伙伴项目x3”(3gpp2)的组织的文献中描述。3gpp和3gpp2文献是公众可获取的。无线局域网(wlan)也可以是ieee 802.11x网络,而无线个域网(wpan)可以是蓝牙网络、ieee 802.15x或某个其他类型的网络。本文中所描述的技术也可被用于wwan、wlan、和/或wpan的任何组合。
[0127]
移动设备1100可进一步包括(诸)传感器1140。传感器1140可包括但不限于一个或多个惯性传感器和/或其他传感器(例如,加速度计、陀螺仪、相机、磁力计、高度计、话筒、邻近度传感器、光传感器、气压计等),其中一些传感器可被用于获得与定位有关的测量和/或其他信息。
[0128]
移动设备1100的各实施例还可包括gnss接收机1180,其能够使用天线1182(其可以与天线1132相同)从一个或多个gnss卫星接收信号1184。基于gnss信号测量的定位可被用来补充和/或纳入本文中所描述的技术。gnss接收机1180可使用常规技术从gnss系统(诸如全球定位系统(gps)、伽利略、glonass、日本上方的准天顶卫星系统(qzss)、印度上方的印度地区性导航卫星系统(irnss)、中国上方的北斗导航卫星系统(bds)等)的gnss卫星110
提取移动设备1100的定位。此外,gnss接收机1180可用于可与一个或多个全球性和/或区域性导航卫星系统相关联或者以其他方式被启用以与一个或多个全球性和/或区域性导航卫星系统联用的各种扩增系统(例如,基于卫星的扩增系统(sbas)),诸如举例而言广域扩增系统(waas)、欧洲对地静止导航覆盖服务(egnos)、多功能性卫星扩增系统(msas)、以及地理扩增导航系统(gagan)等。
[0129]
可以注意到,尽管在图11中将gnss接收机1180解说为相异的组件,但是实施例并不限于此。如本文中所使用的,术语“gnss接收机”可以包括被配置成获取gnss测量(来自gnss卫星的测量)的硬件和/或软件组件。因此,在一些实施例中,gnss接收机可包括由一个或多个处理单元(诸如处理单元1110、dsp 1120和/或无线通信接口1130内(例如,在调制解调器中)的处理单元)(作为软件)执行的测量引擎。gnss接收机还可以可任选地包括定位引擎,该定位引擎可以使用来自测量引擎的gnss测量以使用扩展卡尔曼滤波器(ekf)、加权最小二乘法(wls)、hatch滤波器、粒子滤波器等来确定gnss接收机的定位。定位引擎也可由一个或多个处理单元(诸如处理单元1110或dsp 1120)执行。
[0130]
移动设备1100可进一步包括存储器1160和/或与存储器1160处于通信。存储器1160可包括但不限于本地和/或网络可访问存储、磁盘驱动器、驱动器阵列、光学存储设备、固态存储设备(诸如随机存取存储器(ram)和/或只读存储器(rom)),其可以是可编程的、可快闪更新的等等。此类存储设备可被配置成实现任何恰适的数据存储,包括但不限于各种文件系统、数据库结构等等。
[0131]
移动设备1100的存储器1160还可包括软件元素(图11中未示出),这些软件元素包括操作系统、设备驱动程序、可执行库、和/或其他代码(诸如一个或多个应用程序),这些软件元素可包括由各种实施例提供的计算机程序、和/或可被设计成实现由其他实施例提供的方法、和/或配置由其他实施例提供的系统,如本文中所描述的。仅作为示例,关于以上讨论的(诸)方法描述的一个或多个规程可被实现为可由移动设备1100(和/或移动设备1100内的(诸)处理单元1110或dsp 1120)执行的存储器1160中的代码和/或指令。在一方面,此类代码和/或指令随后可以被用来配置和/或适配通用计算机(或者其他设备)来执行根据所描述的方法的一个或多个操作。
[0132]
图12是计算机系统1200的实施例的框图,其可以整体地或部分地被用于提供如在本文的各实施例中描述的一个或多个网络组件(例如,图1和6的位置服务器160或图2的lmf)的功能。例如,计算机系统1200可执行图10中所示的方法的一个或多个功能。应当注意,图12仅旨在提供各种组件的一般化解说,可恰适地利用其中任何或全部组件。因此,图12宽泛地解说了如何以相对分开或相对更集成的方式来实现个体系统元件。另外,可以注意到,由图12解说的组件可被局部化成单个设备和/或分布在可被布置在不同地理位置处的各种联网设备之中。
[0133]
计算机系统1200被示为包括可经由总线1205来电耦合(或者可以恰适地以其他方式处于通信)的硬件元件。硬件元件可以包括(诸)处理单元1210,其可以包括但不限于一个或多个通用处理器、一个或多个专用处理器(诸如数字信号处理芯片、图形加速处理器等等)、和/或其他处理结构,它们可被配置成执行本文中所描述的一种或多种方法。计算机系统1200还可包括:一个或多个输入设备1215,其可包括但不限于鼠标、键盘、相机、话筒等等;以及一个或多个输出设备1220,其可包括但不限于显示器设备、打印机等等。
[0134]
计算机系统1200可以进一步包括一个或多个非瞬态存储设备1225(和/或与该一个或多个非瞬态存储设备1225处于通信),其可包括但不限于本地和/或网络可访问存储,和/或可包括但不限于磁盘驱动器、驱动器阵列、光学存储设备、固态存储设备(诸如ram和/或rom),它们可以是可编程的、可快闪更新的、等等。此类存储设备可被配置成实现任何恰适的数据存储,包括但不限于各种文件系统、数据库结构等等。此类数据存储可包括数据库和/或用于存储和管理要经由中枢被发送给一个或多个设备的消息和/或其他信息的其他数据结构,如本文描述的。
[0135]
计算机系统1200还可包括通信子系统1230,其可包括由无线通信接口1233管理和控制的无线通信技术、以及有线技术(诸如以太网、同轴通信、通用串行总线(usb)等)。无线通信接口1233可包括一个或多个无线收发机,其可经由(诸)无线天线1250来发送和接收无线信号1255(例如,根据5g nr或lte的信号)。由此,通信子系统1230可包括调制解调器、网卡(无线或有线)、红外通信设备、无线通信设备、和/或芯片组等等,它们可以使得计算机系统1200能够在本文中所描述的通信网络中的任何或全部通信网络上与相应网络上的任何设备(包括ue/移动设备、基站和/或其他trp、和/或本文中描述的任何其他电子设备)通信。因此,通信子系统1230可被用于如本文的实施例中描述地接收和发送数据。
[0136]
在许多实施例中,计算机系统1200将进一步包括工作存储器1235,其可包括ram或rom设备,如上所描述的。被示为位于工作存储器1235内的软件元件可包括操作系统1240、设备驱动程序、可执行库、和/或其他代码(诸如一个或多个应用1245),这些软件元件可包括由各种实施例提供的计算机程序、和/或可被设计成实现由其他实施例提供的方法和/或配置由其他实施例提供的系统,如本文中所描述的。仅作为示例,关于以上讨论的(诸)方法所描述的一个或多个规程可被实现为可由计算机(和/或计算机内的处理单元)执行的代码和/或指令;在一方面,此类代码和/或指令随后可被用来配置和/或适配通用计算机(或其他设备)以根据所描述的方法来执行一个或多个操作。
[0137]
这些指令和/或代码的集合可被存储在非瞬态计算机可读存储介质(诸如上述(诸)存储设备1225)上。在一些情形中,存储介质可被纳入计算机系统(诸如计算机系统1200)内。在其他实施例中,存储介质可以与计算机系统分开(例如,可移动介质,诸如光碟),和/或可被提供在安装包中,以使得存储介质可被用来对存储有指令/代码的通用计算机进行编程、配置和/或适配。这些指令可以采取可执行代码的形式(其可由计算机系统1200执行)和/或可以采取源代码和/或可安装代码的形式,这些指令在计算机系统1200上编译和/或安装(例如,使用各种通用编译器、安装程序、压缩/解压缩实用程序等中的任一者)之际,则采取可执行代码的形式。
[0138]
将对本领域技术人员显而易见的是,可根据具体要求来作出实质性变型。例如,也可使用定制的硬件,和/或可在硬件、软件(包括便携式软件,诸如小应用程序等)、或两者中实现特定元素。进一步,可以采用到其他计算设备(诸如网络输入/输出设备)的连接。
[0139]
参照附图,可包括存储器的组件可包括非瞬态机器可读介质。如本文所使用的术语“机器可读介质”和“计算机可读介质”是指参与提供使机器以特定方式操作的数据的任何存储介质。在上文所提供的实施例中,在向处理单元和/或其他设备提供指令/代码以供执行时可能涉及各种机器可读介质。附加地或替换地,机器可读介质可被用于存储和/或携带此类指令/代码。在许多实现中,计算机可读介质是物理和/或有形存储介质。此类介质可
采取许多形式,包括但不限于非易失性介质和易失性介质。计算机可读介质的常见形式包括例如:磁性和/或光学介质、具有孔图案的任何其他物理介质、ram、可编程rom(prom)、可擦除prom(eprom)、flash-eprom、任何其他存储器芯片或存储器盒、或计算机可以从其读取指令和/或代码的任何其他介质。
[0140]
本文所讨论的方法、系统和设备是示例。各个实施例可恰适地省略、替代、或添加各种规程或组件。例如,参考某些实施例所描述的特征可在各种其他实施例中被组合。实施例的不同方面和要素可以按类似方式组合。本文中提供的附图的各种组件可被体现在硬件和/或软件中。而且,技术会演进,并且因此许多要素是示例,其不会将本公开的范围限定于那些特定示例。
[0141]
主要出于普遍使用的原因,将此类信号称为比特、信息、值、元素、码元、字符、变量、项、数量、数字等已证明有时是方便的。然而,应当理解,所有这些或类似术语要与恰适物理量相关联且仅仅是便利性标签。除非另外具体声明,否则如从以上讨论显而易见的,应领会,贯穿本说明书,利用诸如“处理”、“计算”、“演算”、“确定”、“查明”、“标识”、“关联”、“测量”、“执行”等术语的讨论是指特定装置(诸如专用计算机或类似的专用电子计算设备)的动作或过程。因此,在本说明书的上下文中,专用计算机或类似的专用电子计算设备能够操纵或变换通常表示为该专用计算机或类似的专用电子计算设备的存储器、寄存器、或其他信息存储设备、传输设备、或显示设备内的物理量、电子量、电气量或磁性量的信号。
[0142]
如本文中所使用的术语“和”和“或”可包括还预期至少部分地取决于使用此类术语的上下文的各种含义。通常,“或”如果被用于关联一列表,诸如a、b或c,则旨在表示a、b和c(此处使用的是包含性的含义)以及a、b或c(此处使用的是排他性的含义)。另外,本文所使用的术语“一者或多者”可被用于描述单数形式的任何特征、结构或特性,或者可用于描述特征、结构或特性的某种组合。然而,应当注意,这仅是解说性示例,并且所要求保护的主题内容不限于此示例。此外,术语“中的至少一者”如果被用于关联一列表,诸如a、b或c,则可被解释为表示a、b和/或c的任何组合,诸如a、ab、aa、aab、aabbccc等。
[0143]
已描述了若干实施例,可以使用各种修改、替换构造和等价物而不会脱离本公开的精神。例如,以上元件可以仅是较大系统的组件,其中其他规则可优先于各个实施例的应用或者以其他方式修改各个实施例的应用。此外,可以在考虑以上要素之前、期间或之后采取数个步骤。相应地,以上描述并不限制本公开的范围。
[0144]
鉴于此说明书,各实施例可包括特征的不同组合。在以下经编号条款中描述了各实现示例:
[0145]
条款1。一种针对在移动设备的定位确定中使用的无线节点中的定时误差的可重构智能表面(ris)辅助式校准的方法,该方法包括:获得无线参考信号测量集合,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量;对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量;对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和该第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量;获得包括该第三测量与该第四测量之差的差分值;以及至少部分地基于以下各项来确定该移动设备的定位估计:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
[0146]
条款2。如条款1的方法,其中,该方法是由与该移动设备通信的计算机服务器执行的,并且其中确定该定位估计包括:在该计算机服务器处接收由该移动设备进行的该测量。
[0147]
条款3。如条款1的方法,其中:该第一测量、该第二测量、该第三测量和该第四测量各自包括相应的往返时间(rtt)测量;并且确定该移动设备的定位估计进一步包括:确定该差分值与第二差分值之差,该第二差分值包括该第三测量与该第四测量之差。
[0148]
条款4。如条款3的方法,其中,该方法是由该移动设备或计算机服务器执行的。
[0149]
条款5。如条款1的方法,其中:该第一测量、该第二测量、该第三测量和该第四测量中的每一者的该一个或多个无线参考信号包括由该移动设备接收的下行链路(dl)参考信号或侧链路(sl)参考信号;该差分值包括基于该第三测量和该第四测量的参考信号时间差(rstd)测量;并且确定该移动设备的该定位估计进一步包括至少部分地基于以下各项来估计定时误差:基于该第三测量和该第四测量的该rstd测量,以及该第一无线节点、该第二无线节点和该ris中的每一者的相应位置。
[0150]
条款6。如条款5的方法,其中,该移动设备确定该rstd测量并向计算机服务器发送该rstd测量。
[0151]
条款7。如条款5或6的方法,其中,该移动设备确定该定时误差并向计算机服务器发送该定时误差。
[0152]
条款8。如条款5-7中任一者的方法,其中,该移动设备确定该定位估计。
[0153]
条款9。如条款1的方法,其中:该第一测量、该第二测量、该第三测量和该第四测量中的每一者的该一个或多个无线参考信号包括由该移动设备传送的上行链路(ul)参考信号或侧链路(sl)参考信号;该第三测量包括第一抵达时间(toa)测量;该第四测量包括第二toa测量;该差分值包括该第一toa测量与该第二toa测量之间的时间差;并且确定该移动设备的该定位估计进一步包括至少部分地基于以下各项来估计定时误差:该差分值,以及该第一无线节点、该第二无线节点和该ris中的每一者的相应位置。
[0154]
条款10。如条款9的方法,其中,该方法是由计算机服务器执行的。
[0155]
条款11。一种用于针对在移动设备的定位确定中使用的无线节点中的定时误差的可重构智能表面(ris)辅助式校准的设备,该设备包括:收发机;存储器;以及与该收发机和该存储器通信地耦合的一个或多个处理单元,该一个或多个处理单元被配置成:经由该收发机获得无线参考信号测量集合,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量;对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量;对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和该第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量;获得包括该第三测量与该第四测量之间的差的差分值;以及至少部分地基于以下各项来确定该移动设备的定位估计:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
[0156]
条款12。如条款11的设备,其中,该设备包括与该移动设备通信的计算机服务器,并且其中为了确定该定位估计,该一个或多个处理单元被配置成经由该收发机接收由该移动设备进行的该测量。
[0157]
条款13。如条款11的设备,其中:该第一测量、该第二测量、该第三测量和该第四测
量各自包括相应的往返时间(rtt)测量;并且为了确定该移动设备的该定位估计,该一个或多个处理单元被配置成确定该差分值与第二差分值之间的差,该第二差分值包括该第三测量与该第四测量之间的差。
[0158]
条款14。如条款13的设备,其中,该设备包括该移动设备或计算机服务器。
[0159]
条款15。如条款11的设备,其中:该第一测量、该第二测量、该第三测量和该第四测量中的每一者的该一个或多个无线参考信号包括由该移动设备接收的下行链路(dl)参考信号或侧链路(sl)参考信号;该差分值包括基于该第三测量和该第四测量的参考信号时间差(rstd)测量;并且为了确定该移动设备的该定位估计,该一个或多个处理单元被配置成至少部分地基于以下各项来估计定时误差:基于该第三测量和该第四测量的该rstd测量,以及该第一无线节点、该第二无线节点和该ris中的每一者的相应位置。
[0160]
条款16。如条款15的设备,其中,该设备包括该移动设备,并且其中该一个或多个处理单元被进一步配置成确定该rstd测量并经由该收发机向计算机服务器发送该rstd测量。
[0161]
条款17。如条款15或16的设备,其中,该一个或多个处理单元被进一步配置成确定该定时误差并经由该收发机向计算机服务器发送该定时误差。
[0162]
条款18。如条款15-17中任一者的设备,其中,该一个或多个处理单元被进一步配置成确定该定位估计。
[0163]
条款19。如条款11的设备,其中:该第一测量、该第二测量、该第三测量和该第四测量中的每一者的该一个或多个无线参考信号包括由该移动设备传送的上行链路(ul)参考信号或侧链路(sl)参考信号;该第三测量包括第一抵达时间(toa)测量;该第四测量包括第二toa测量;该差分值包括该第一toa测量与该第二toa测量之间的时间差;并且为了确定该移动设备的该定位估计,该一个或多个处理单元被配置成至少部分地基于以下各项来估计定时误差:该差分值,以及该第一无线节点、该第二无线节点和该ris中的每一者的相应位置。
[0164]
条款20。如条款19的设备,其中,该设备包括计算机服务器。
[0165]
条款21。一种用于针对在移动设备的定位确定中使用的无线节点中的定时误差的可重构智能表面(ris)辅助式校准的设备,该设备包括:用于获得无线参考信号测量集合的装置,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量;对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量;对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和该第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量;用于获得包括该第三测量与该第四测量之间的差的差分值的装置;以及用于至少部分地基于以下各项来确定该移动设备的定位估计的装置:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
[0166]
条款22。如条款21的设备,其中,用于确定该定位估计的装置包括用于在该设备处接收由该移动设备进行的该测量的装置。
[0167]
条款23。如条款21的设备,其中:该第一测量、该第二测量、该第三测量和该第四测量各自包括相应的往返时间(rtt)测量;并且用于确定该移动设备的该定位估计的装置进
一步包括用于确定该差分值与第二差分值之间的差的装置,该第二差分值包括该第三测量与该第四测量之间的差。
[0168]
条款24。如条款23的设备,其中,该设备包括该移动设备或计算机服务器。
[0169]
条款25。如条款21的设备,其中:该第一测量、该第二测量、该第三测量和该第四测量中的每一者的该一个或多个无线参考信号包括由该移动设备接收的下行链路(dl)参考信号或侧链路(sl)参考信号;该差分值包括基于该第三测量和该第四测量的参考信号时间差(rstd)测量;并且用于确定该移动设备的该定位估计的装置进一步包括用于至少部分地基于以下各项来估计定时误差的装置:基于该第三测量和该第四测量的该rstd测量,以及该第一无线节点、该第二无线节点和该ris中的每一者的相应位置。
[0170]
条款26。如条款25的设备,其中,该设备包括该移动设备,并且其中该设备进一步包括用于确定该rstd测量的装置和用于向计算机服务器发送该rstd测量的装置。
[0171]
条款27。如条款25或26的设备,其中,该设备包括该移动设备,并且其中该设备进一步包括用于确定该定时误差的装置和用于向计算机服务器发送该定时误差的装置。
[0172]
条款28。如条款25-27中任一者的设备,其中,该设备包括该移动设备,并且其中该设备进一步包括用于确定该定位估计的装置。
[0173]
条款29。如条款21的设备,其中:该第一测量、该第二测量、该第三测量和该第四测量中的每一者的该一个或多个无线参考信号包括由该移动设备传送的上行链路(ul)参考信号或侧链路(sl)参考信号;该第三测量包括第一抵达时间(toa)测量;该第四测量包括第二toa测量;该差分值包括该第一toa测量与该第二toa测量之间的时间差;并且用于确定该移动设备的该定位估计的装置进一步包括至少部分地基于以下各项来估计定时误差:该差分值,以及该第一无线节点、该第二无线节点和该ris中的每一者的相应位置。
[0174]
条款30。一种非瞬态计算机可读介质,存储用于针对在移动设备的定位确定中使用的无线节点中的定时误差的可重构智能表面(ris)辅助式校准的指令,该指令包括用于以下操作的代码:获得无线参考信号测量集合,该无线参考信号测量集合包括:对在该移动设备和第一无线节点之间行进的一个或多个无线参考信号的第一测量;对在该移动设备和第二无线节点之间行进的一个或多个无线参考信号的第二测量;对在该移动设备和第一无线节点之间行进时被ris反射的一个或多个无线参考信号的第三测量;以及对在该移动设备和该第二无线节点之间行进时被该ris反射的一个或多个无线参考信号的第四测量;获得包括该第三测量与该第四测量之差的差分值;以及至少部分地基于以下各项来确定该移动设备的定位估计:该无线参考信号测量集合,该差分值,以及第一无线节点、第二无线节点和该ris中的每一者的相应位置。
当前第1页1
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!